Dynamic positioning intro
Prerequisites
- Firmware version 0.80 or higher
- Active and calibrated AHRS system, our SKU 2503 or the Autopilot using its EKF (via MAVLink v2).
- ActiveGPS satellite signal with 3D fix. It can degradate with bad weather and or tall buildings around.
- Propulsion:the vehicle must be free to move in both X,Y dimensions while being able to perform a yaw motion on the spot.
- 3 active and configured controllers are necessary for the vehicle to maintain a stable position in the DP mode:
These must be mapped to the physical Propulsion and work flawlessly.
DP telemetry screen
Allows debugging and realtime view of the DP controllers.
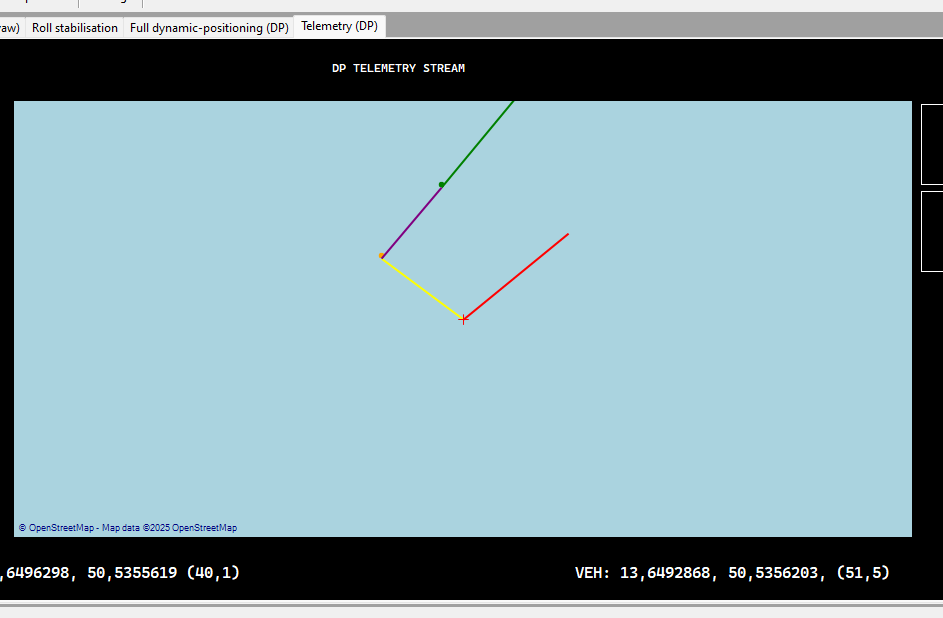
Once all functions are enabled and the vehicle is in the DP mode, the telemetry map will show the following information:
- Vehicle position and heading
- Target position and heading
- Targetline distance (The vehicle will try to close this distance using the LTD controller)
- Cross-line distance (The vehicle will try to close this distance using the XTD controller)
- Cross-line projection (foot)
On the left side panel all relevant parameters are displayed as the various distances and controller outputs.