Controller: Z-Drive
Propeller settings
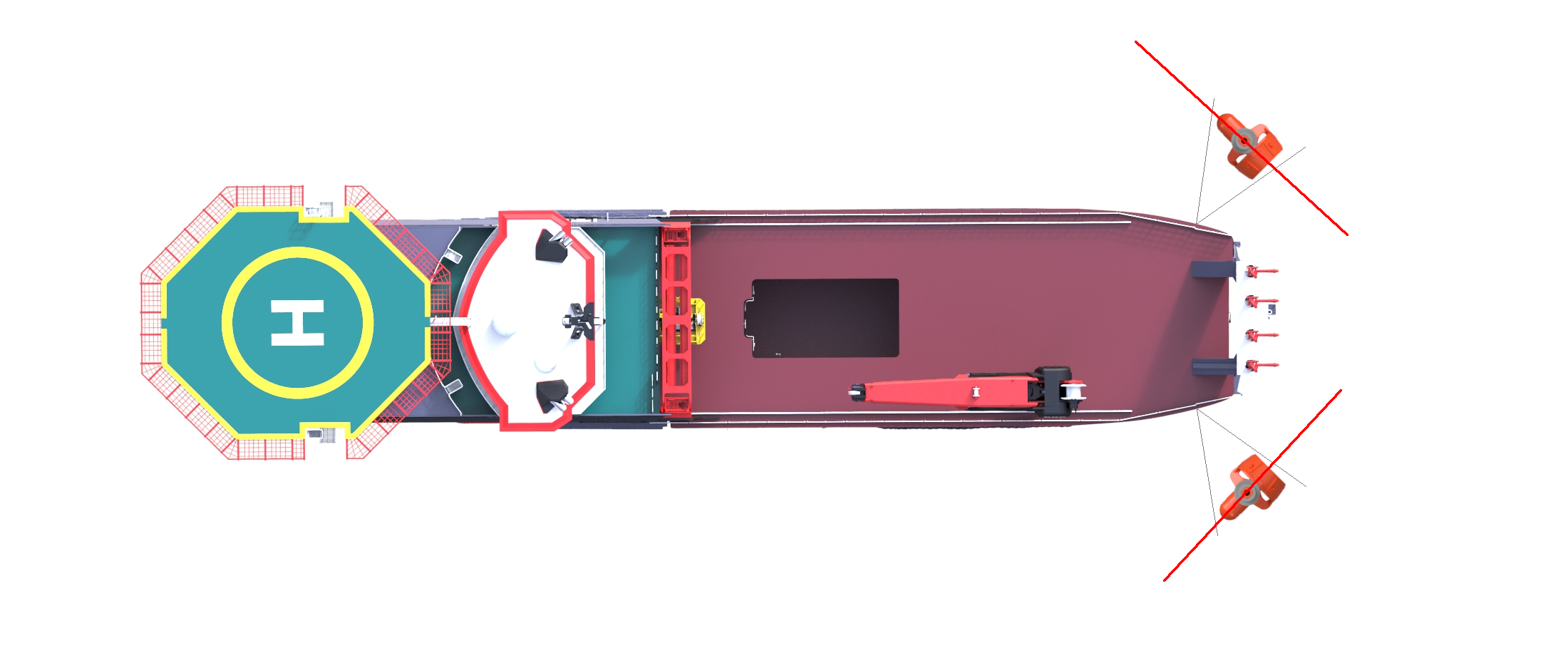
The VEKTOR Core features four virtual controllers for Z-Drives. They support and require an azimuth rotation of 180 degrees as well as a bidirectional ESC.
Configuration
The virtual controller takes as input the steering (azimuth) and throttle (thrust) signal, these can also be forwarded from positioning controllers or autopilots.
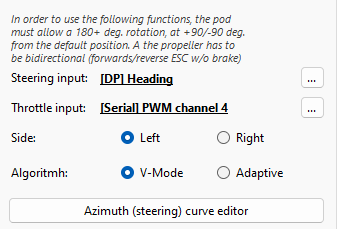
Side and Algorithm options are relevant in case of Dynamic positioning options.
Azimuth mapping
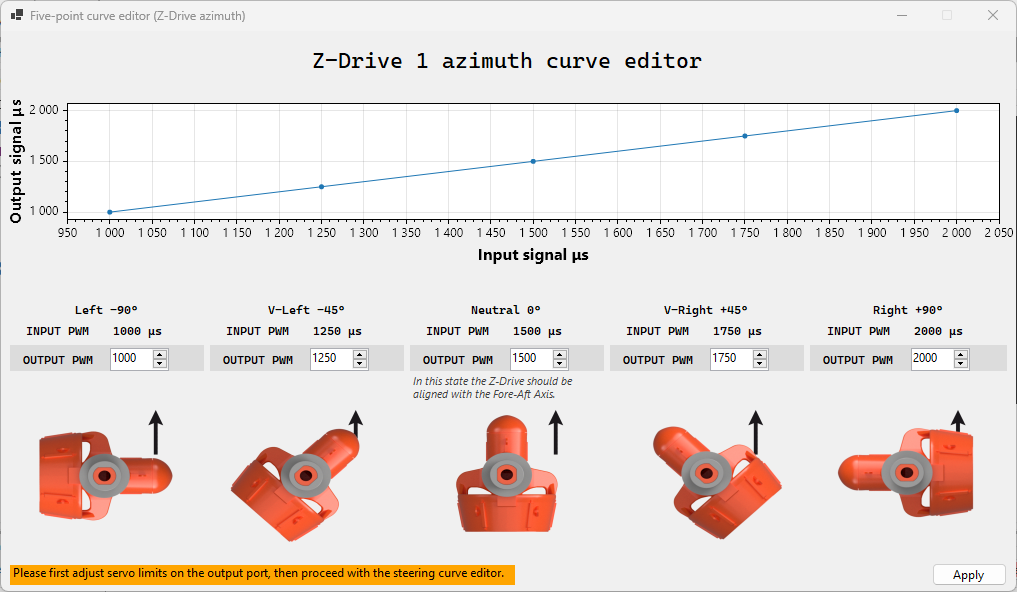
We use a 5-point interpolation to map the Z-Drive azimuth servo to the gondola. To ensure proper operation of the controller, five gondola positions must be defined and calibrated.
The software must know the gondola positions in the following cases:
- +90/-90 degrees: The maximum deflection allowed for the gondola.
- +45/-45 degrees: Used to position the gondolas in V-Mode for DP.
- 0 degrees: The gondola is aligned with the ship.
At the same time the ESC must allow the propeller to rotate clockwise and counter clockwise.
In the azimuth editor ensure that for every PWM pulse the physical gondola corresponds with the drawn example, e.g -45 degrees at 1250 µs.
Eventually invert the servo in the output tab.
V-Mode