Attitude & GNSS
The VEKTOR Core has two ways to retrieve real-time attitude and positioning data. This happens either through an AHRS and a U-BLOX GPS module directly connected to the controller, or through a MAVLink connection which supplies these data generate from an autopilot e.g. our VEKTOR Autopilot.
The latter method is recommended as it spares many wiring and adds all advanced options an autopilot has to give.
Connection
Using MAVLink v2
The X7 port is DMA enabled and can receive up to 1Mbit/s of MAVLink data.
In the autopilot set following parameters (applies to VEKTOR Autopilot, others may have different ports):
| Parameter | Value |
|---|---|
| SERIAL4_BAUD | 921600 |
| SERIAL4_PROTOCOL | 2 |
| SR3_RC_CHAN | 50 |
| SR3_POSITION | 10 |
| SR3_EXTRA1 | 10 |
In the VKconf program check the option "Use as AHRS/GNSS source"

In addition to attitude and positioning data, the MAVLink does also provide all RC channels from the autopilot.
To receive healthy AHRS data from the Autopilot you must calibrate it well!
Using a dedicated AHRS + U-BLOX GPS
Follow the Quick start wiring to connect the AHRS and GPS receiver.
Also make sure to configure the U-Blox GPS module accordingly.
Configuration
Once connected, check in the VKconf program if the controllers receives correctly all data. In the navigation tab click on GNSS stream to check the GPS module. It should display your current coordinates or at least a "NO FIX" message if the GPS receiver is not ready yet.
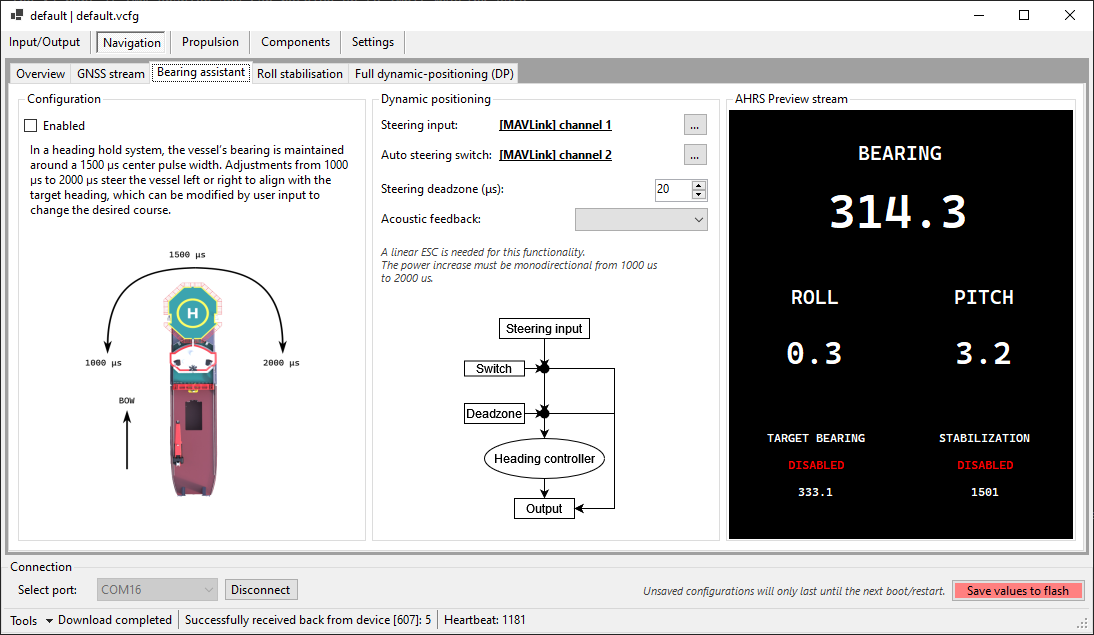
Click on "Bearing assistant" to check the function of the attitude sensors/data.