RX through MAVLink (X7)
Autopilot connection
Although designed for use with our Autopilot module, the Vektor Core is compatible with most STM32-based autopilots that support MAVLink v2, such as the Pixhawk series, Holybro Kakute, and others.
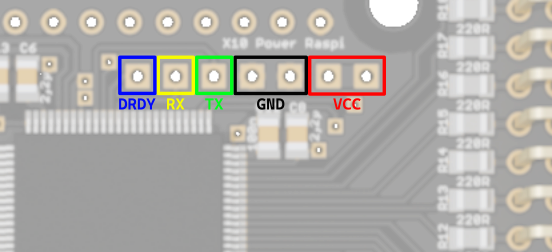
Simply connect the appropriate pins on the X7 port header. The required connections are TX, RX, and GND.
The port speed is 921600 baud.
Then follow these instructions and the steps below.
It is possible to gather from the Autopilot: attitude, GPS data, servo channels. Or all togheter.
Configuration in Mission Planner
Attach the RX to the Autopilot and configure all as usual.
Follow these steps first to etablish a solid datalink between the Core and the Autopilot boards.
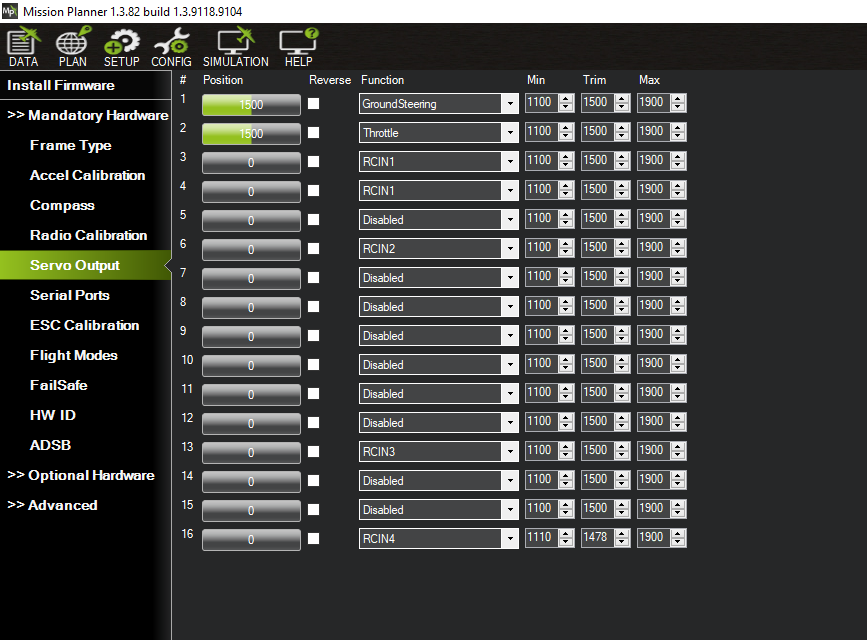
On the Servo Output tab in Mission Planner, assign all the required channels. You will most likely need to configure the GroundSteering and Throttle channels. Any additional channels can be set as RCINx, which means they will pass directly from the transmitter (TX) to the VEKTOR Core without any processing or modification.
Configuration in VKConf
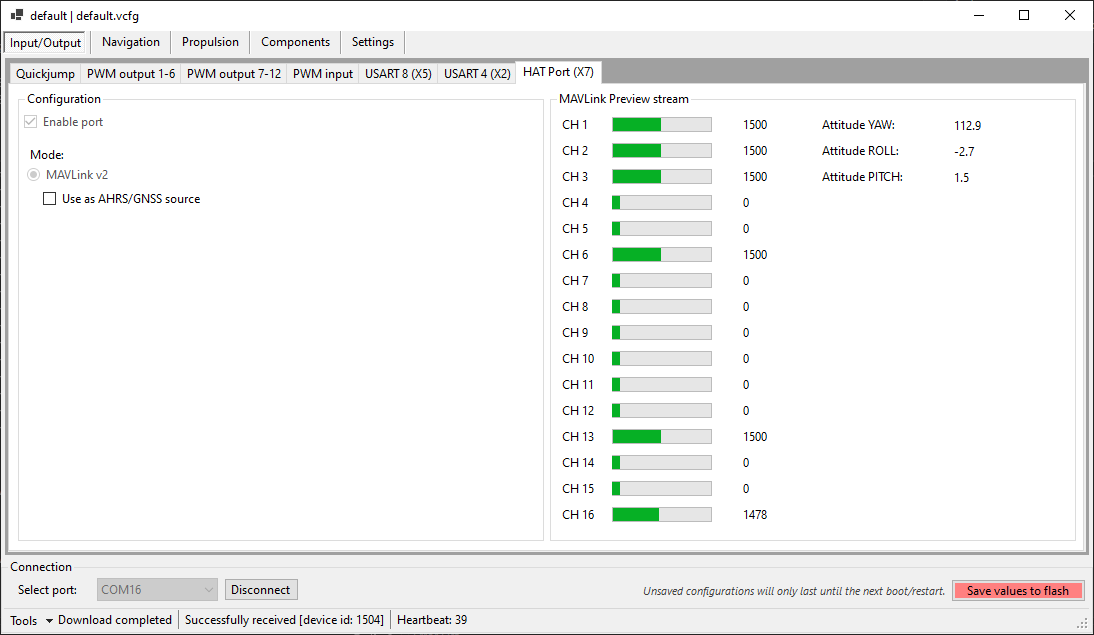
- Check the X7 HAT tab to ensure that all information is being processed correctly. The preview should respond to all transmitter (TX) commands, especially those assigned as RCIN in the previous steps.
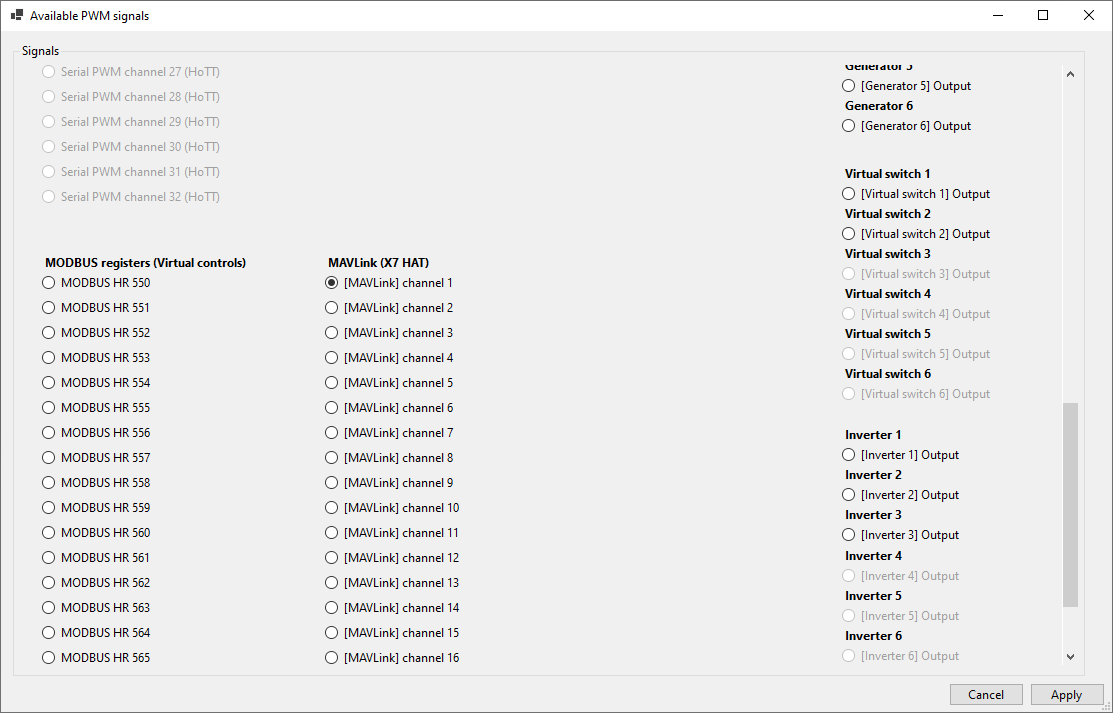
- When assigning a signal, select the appropriate option from the signals list. Choose the
[MAVLink] Channel xsignals, which are numbered from 1 to 16.