Heading stabilization (yaw)
PID Controller
The heading controller can be set in the configuration utility under the "Heading assistant (yaw)" tab. In order to work it needs a compass, either our AHRS unit or an Autopilot with MAVLink (Ardupilot).
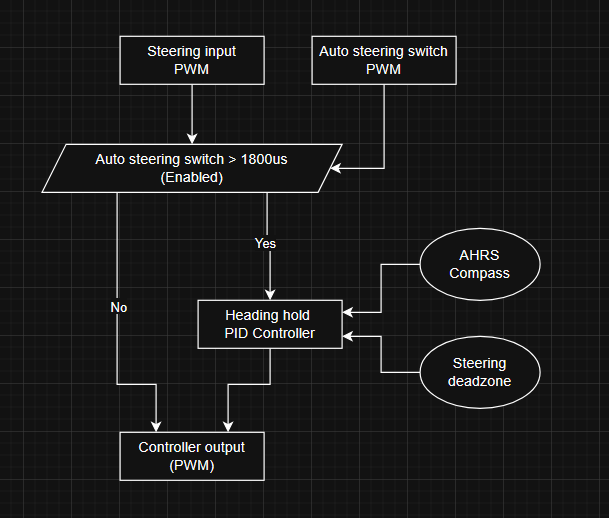
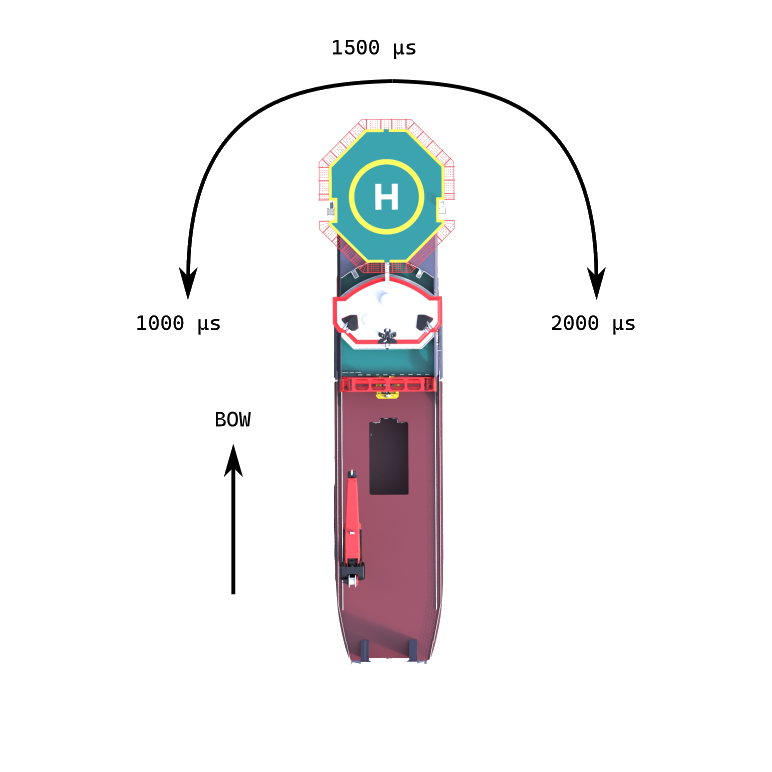
Once the switch channel is active (higher than 1800 μs), the controller will force the vehicle to maintain a given target heading, relative to the DP target position.
This target heading is reset every time the input channel is higher or lower than the channel center 1500 μs +- deazone μs.
The controller should be mapped to the bow/stern thruster when aimed to be used with other DP controllers. Else it can be paired with the steering/azimuth components of the propulsion if intended to guarantee a smooth forward sailing, like in the case of VSPs or tugs with Z-Drives.
The output signal of the controller is available in the signal list:
