Scale model edition (SKU: 1504)
This version of our module is equipped with virtual controllers and drivers specifically designed to support a range of complex propulsion systems for scale model ships, with a particular emphasis on Voith-Schneider Propellers (VSP). This flexibility allows scale modelers to mix and match different propulsion configurations and customize the signal flow to suit unique or exotic setups.
The PWM signal slot system offers a high degree of configurability, enabling modelers to create tailored solutions that meet their specific project requirements. Users can choose from multiple input options, including PWM inputs, RPM sensors, and limit switches, facilitating diverse input configurations.
A key feature of the system is the real-time preview available through the PC configurator, which allows users to observe all changes immediately on the model. This capability enables modelers to see the limits of each servo directly, allowing them to configure these limits to the millimeter without any surprises. Additionally, adaptable limits can be set to safely adjust the travel of every servo. Whether working on experimental designs or realistic scale models this module provides the versatility needed for advanced modeling projects.
Altough capable of working in standalone mode, this unit is meant to work in networked mode. Through its RS485 and CAN connections, an infinity of applications are possible.
Tinkerers have the opportunity to control all functions of the module directly through Modbus registers. These registers are accessible via the USB connection or the Raspberry Pi RX/TX pins on the 40-pin connector. This feature enables extensive customization and interaction with the module, allowing users to adjust various parameters and settings based on their specific project requirements. Whether integrating the module into a larger system or simply experimenting, the available Modbus registers provide an effective way to manage and optimize functionality.
By connecting a Linux-powered single-board computer (SBC) like a Raspberry Pi or Nvidia Jetson, it is possbible to add enhanced navigation, machine learning and AI features to the VEKTOR Core.
The VEKTOR Core is also a perfect match for use with an ArduRover controller. It can be controlled through PWM or SBUS interface and translate simple navigation commands, such as steering and throttle PWM pulses, into complex propulsion schemes.
Features
The standard firmware includes several configurable virtual controllers for various types of more complex propulsion types:
- Up to 4 Voith-Schneider Propellers (VSP)
- Up to 4 ZDrives (Azipods)
- Bow/Stern thrusters
- Up to 3 Pumpjets
- Omni plus layouts
Each controller can drive multiple outputs; for example, one pumpjet controller can drive two pumpjets that behave the same way. An expception are the VSP controllers where each one supports only one propeller.
Example Use Cases
Standalone
- Ring limiter for Voith-Schneider propellers, supporting up to four virtual controllers for up to four propellers. Includes advanced propeller settings for fine-tuning the control rod and thrust azimuth, along with additional RPM controllers for VSP motors.
- Advanced control for waterjets, supporting up to three different virtual controllers with adjustable curves for steering, thrust, and reverse-buckle. Each controller can be used for multiple waterjets.
- Component-based control flow editor, allowing extensive customization.
With Autopilot
- Serves as an advanced propulsion driver for all of the above.
- Acts as a navigation stabilizer, enabling steady bearing in complex propulsion configurations, roll stabilization, and more.
- Supports dynamic positioning aid for compatible propulsion configurations.
Technical specifications
| SKU: | 1504 |
| Supply Voltage (Ub): | 5-9V |
| Power consumption: | Standby current approx. 200 mA |
| PWM inputs: | 6 inputs • PWM (1000 - 2000 μs) |
| PWM outputs: | 12 outputs • PWM (500 - 2500 μs) |
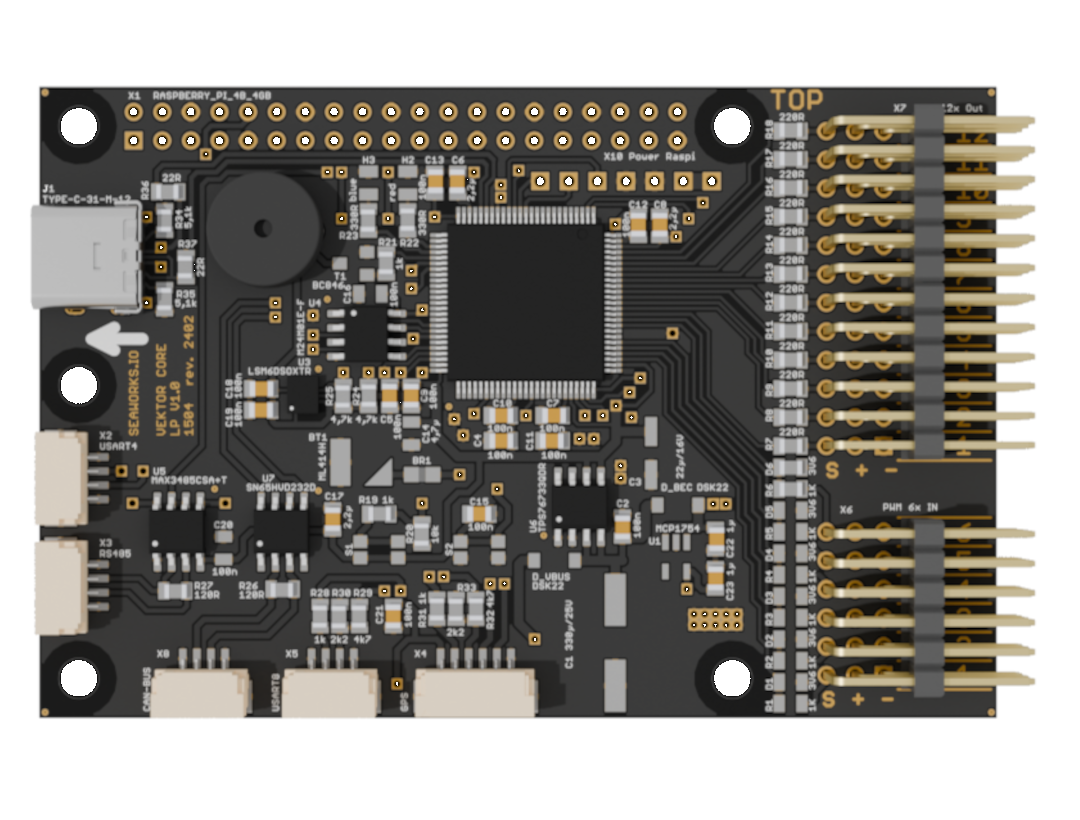
| Additional ports: | • UART JST-GH 4pin (2x) • GPS/i2c combo port JST-GH 6pin • RS485 JST-GH 4pin • CAN JST-GH 4pin (integrated 120 ohm termination) • UART/i2c Raspberry Pi compatible header • Power+UART HAT port 7pin • USB-C 2.0 |
| Buttons: | • Reset button • Boot button |
| Protection features: | • Short circuit protection over BEC |
| CPU: | STM32 H7 processor (ARM Cortex®-M7) |
| Memory: | 1MB ST M24M01 EEPROM |
| Operating temperature range: | 0 – 60° C |
| Maximal relative air humidity: | Max. 85 % |
| Dimensions: | 85.6 mm x 56.5 mm x 1.6mm Raspberry Pi hole layout |
| Regulatory: | RoHS compliant |
Requirements
Physical
The Controller must be placed within a dry zone, properly fastened with screws to the model hull.
Electrical
The Controller works in a range from 5 V to 9 V. The idle current consumption is around 200mA.
Altough technically it is possible to draw power from a broader voltage range (5-31V), we don't recommend this, nor we will cover these cases in warranty. Please note that on the VEKTOR Core, the input voltage is the same as the output voltage on the PWM ports. Be sure to check the voltage specifications of your servos or ESCs before connecting any components.
A steady current flow is necessary to power up all systems and ensure a reliable operation. Please consider this while designing the electrical part of your scale model. It is strongly advised, if not essential, to position PowerPacks close to any components that have any current draw.
The Controller can be powered via all ports on X6 and X7 rails. Additionally it is possbile to power it via port X10. The ports X6, X7, X10 are electrically interconnected.
It is possible to power only the CPU, flash memory and communication part through the USB-C port. This feature serves testing and configuration purposes. In production use do not use the USB-C port to power the Controller.
The USB-C power rail is electrically isolated from ports X6, X7, X10. Only the standard 5V voltage is supported on the USB-C port.