CAN bus
Connection
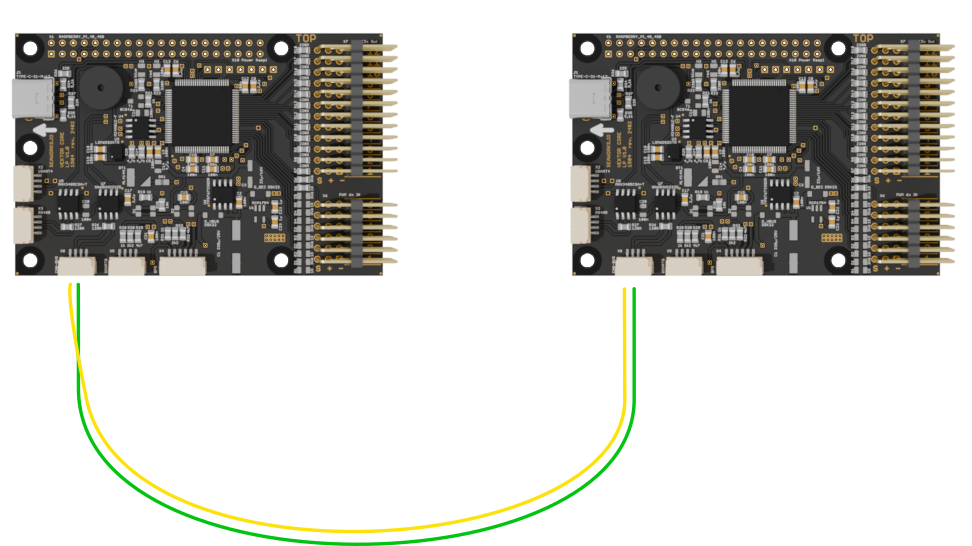
Connect two VEKTOR Core modules using a JST-GH04 patch cable (reversed). Only the two inner wire cores should be connected (CANH, CANL).
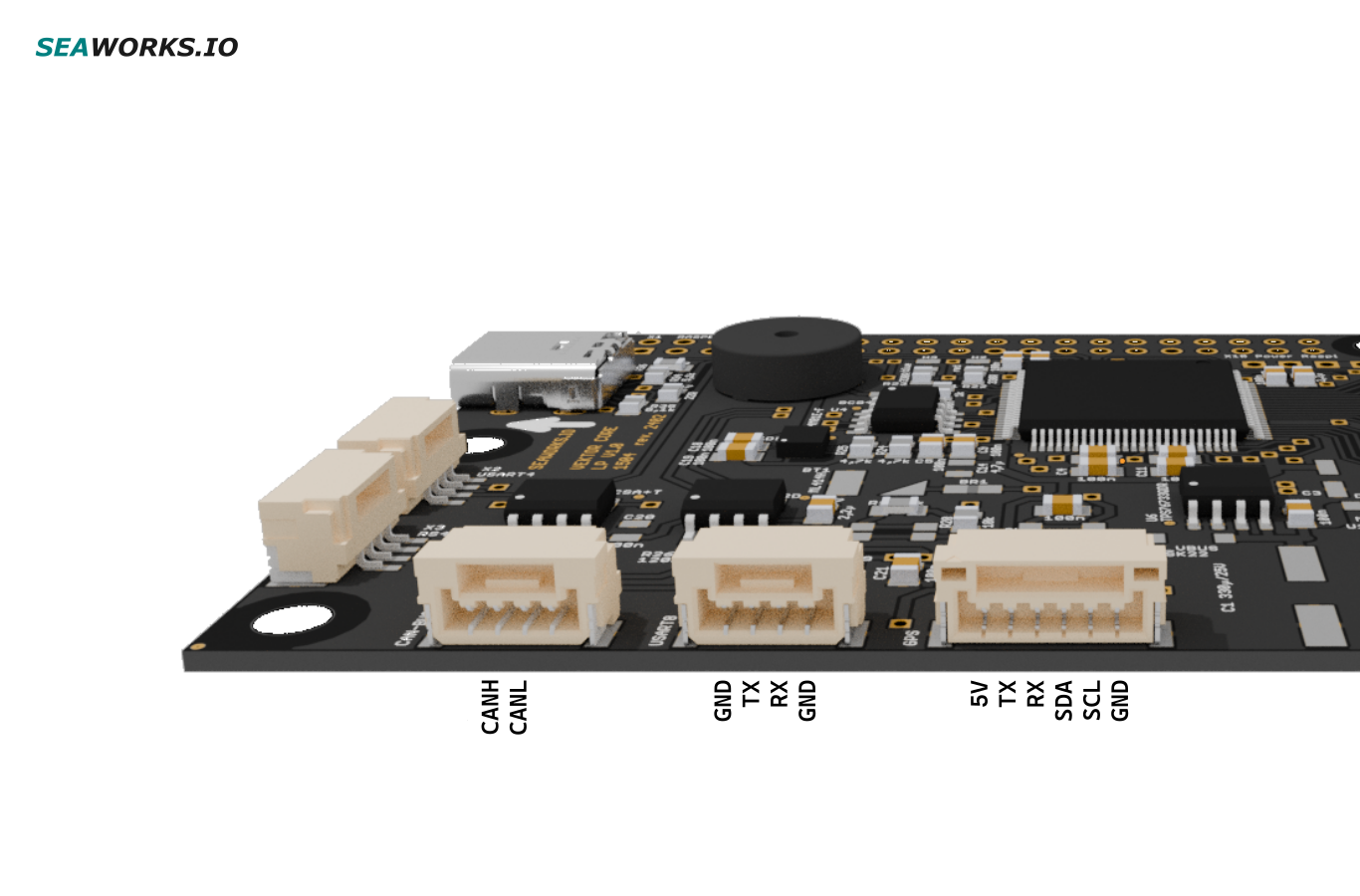
A 120 Ohm resistor is integrated in each module and is therefore not necessary externally.
Unlike other other our products, Vektor Core does not use DroneCAN protocol. It is only meant to be interfaced with another Vektor Core module. For DroneCAN use check the Azimarik Autopilot.
Both modules should be connected to the same ground net. Good grounding is always necessary regardless of CAN.
Configuration
Only two Vektor Core can be interconnected via CAN bus, both should terminate the network as they contain a 120 Ohm resistor. The communication is bidirectional at 800kbps.
Each controller can send 16 arbitrary values, choosen from the signal slots menu, to the other. The latency of the CAN messages is under 20ms therefore not perceptible under common circumstances.
The entire process below (TX and RX of values) can be performed on both VEKTOR Core modules differently and is bidirectional.
e.g. Module 1 sends A,B,C. Module 2 sends X,Y,Z
Send values over CAN (TX)
Vektor core 1
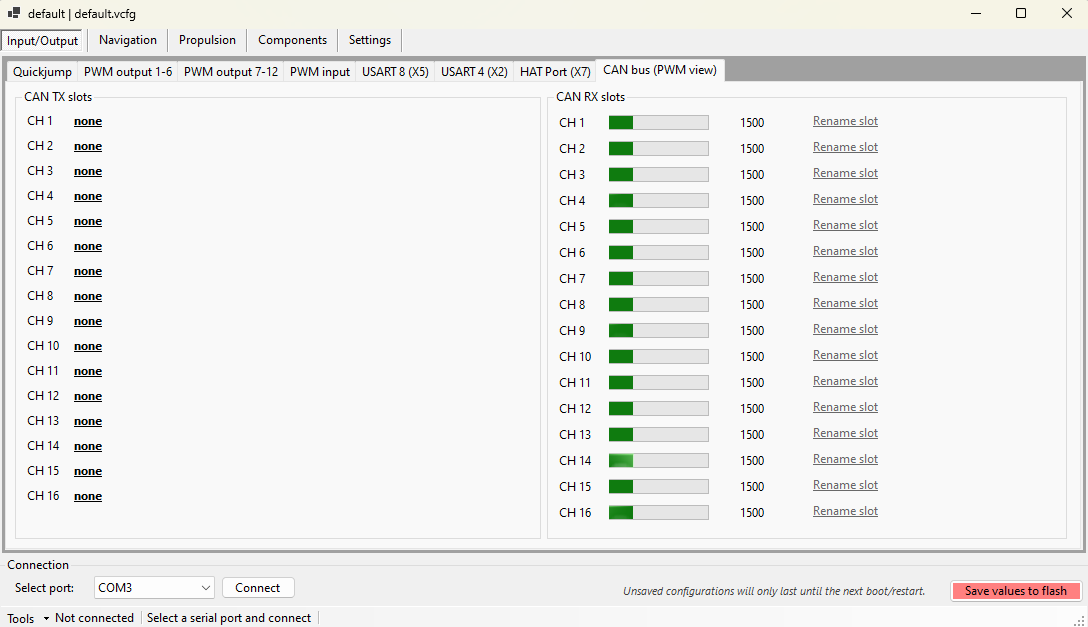
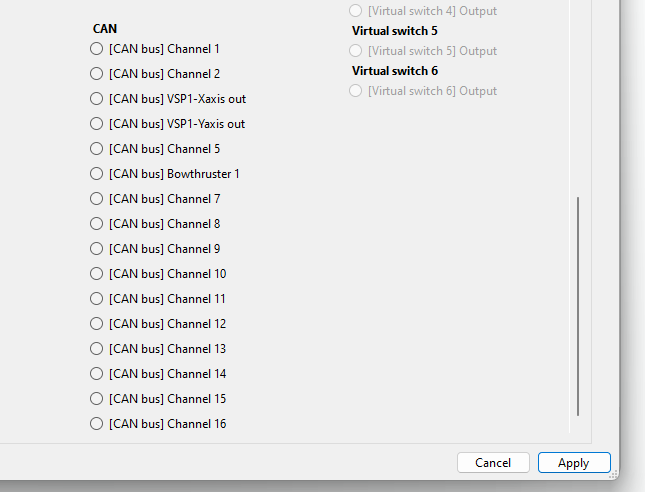
In the section Input/Output->CAN bus (PWM view), in the right pane, you can set the values to be sent from the current module. By clicking on the corresponding channel you can choose any value from signal slots menu. These values will appear on the other side under the corresponding channel in the RX (right pane) section.
Receive values over CAN (RX)
Vektor core 2
The received values will appear on the other side under the corresponding channel in the RX (right pane) section. The progressbars also indicate visually the single values.
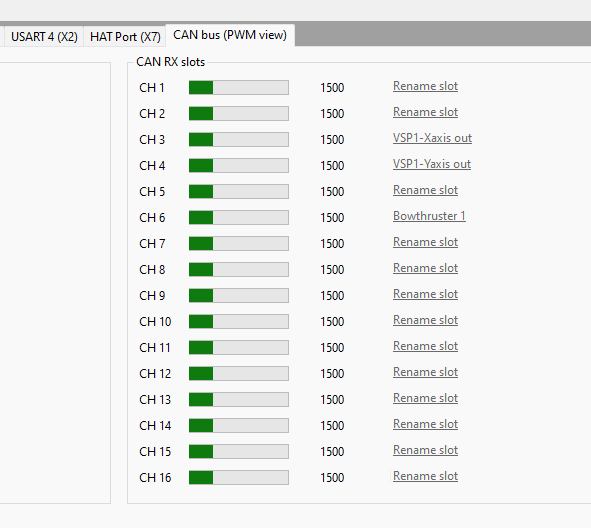
For an easier assignment of these values you can rename them. Once renamed, the names also appear in the signal slots menu.
You can use these values wherever you need in the configuration tool.