Cross-track distance (sway)
Cross-track distance and heading stabilization
Heading stabilization is essential for compensating Cross Track Distance (XTD) because it maintains the vehicle's intended course to the DP target.
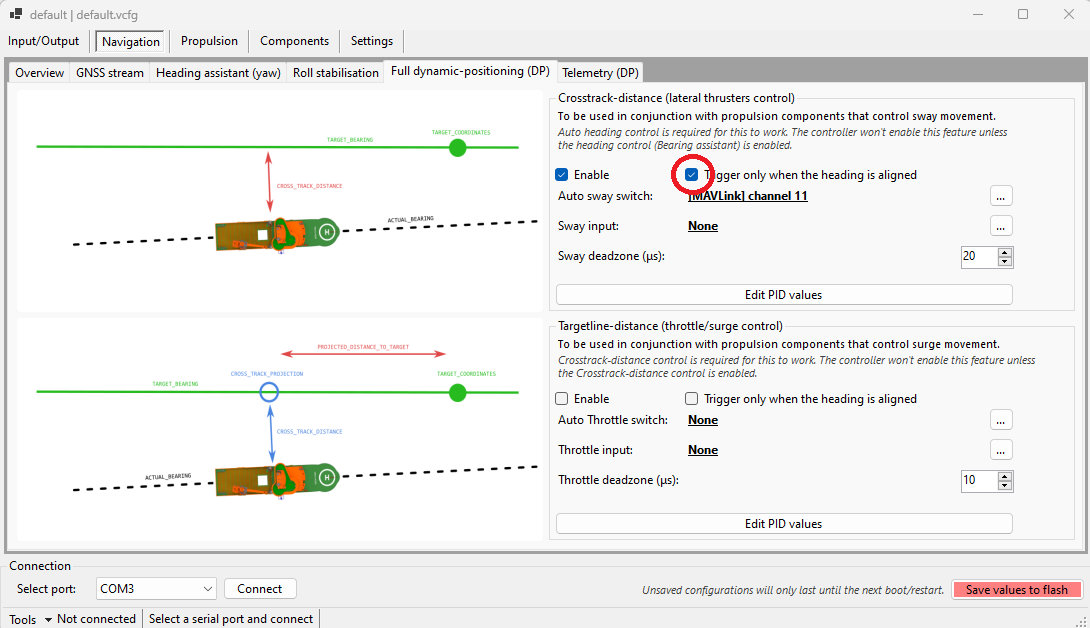
In the configuration utility it the Cross-track distance controller can be set to work only once the vehicle heading is successfully aligned.
PID Controller
The cross-track distance controller should be paired with the sway controls of the propulsion.
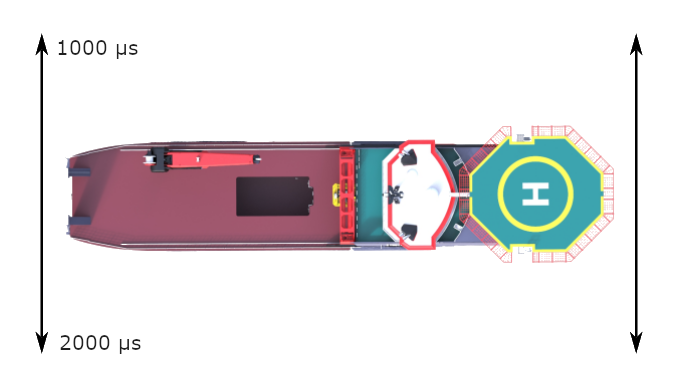
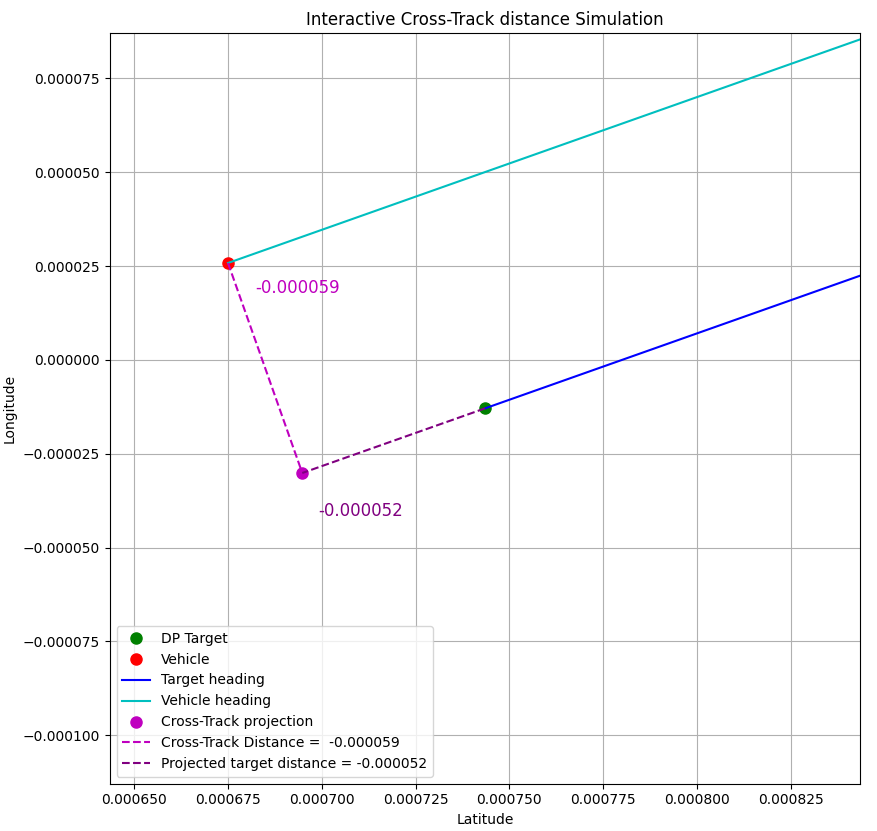
It will regulate the distance between the vehicle and the cross track projection. Once the correct track is reached the controller will output a 1500 μs signal.
It will reset the DP target coordinated to the current position of the vehicle each time the input signal is outside the deadzone so 1500 μs +- deazone μs.
It will reset to a new position if the other active LTD controller goes outside its specified deadzone.
The controller is active only when the "Auto sway switch" signal is higher than 1800 μs else the controller will just return the unmodified input signal.
The output signal of the controller is available in the signal list:
