Dynamic positioning (DP)
Concepts, key Components and Hardware for Dynamic Positioning in the USV segment
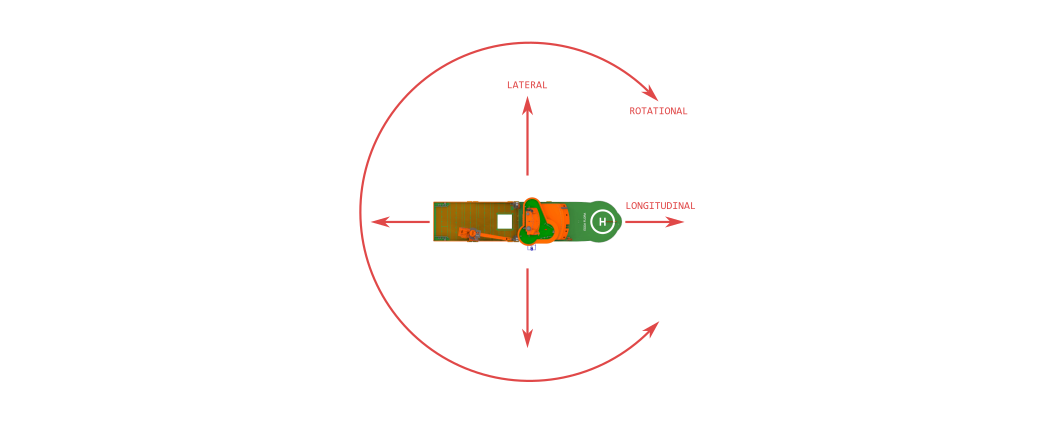
Dynamic positioning encompasses a series of specialized functions that enable the automatic attainment of specific geometric conditions during navigation.
The functions can also be used independently to enhance maneuverability, follow courses, or track waypoints.
Due to variations in propulsion capabilities, size, and weight, not all maneuvers may be feasible for certain vehicles. Cross track control, in particular, can be challenging with standard vessel configurations. These challenges arise because different vessels have differing abilities to manage lateral deviations from their intended course, influenced by factors such as propulsion power, maneuverability, and overall stability.
Transverse maneuver stabilization, particularly heading stabilization, should be available to almost all vehicle configurations.
To achieve full positioning, at least three geometric conditions must be met (see below), for the vehicle the ability to move on 2 axes of freedom is necessary. These movements typically also allow to rotate around the vertical axis (yaw).
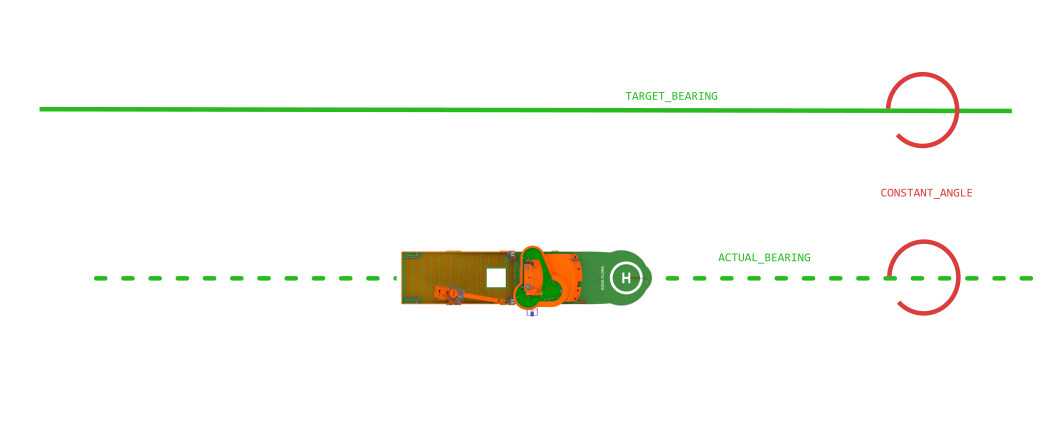
Heading stabilization
Heading stabilization is a dynamic positioning function that maintains a vehicle's orientation relative to a specific direction, despite external forces such as wind, waves, and currents. This function is crucial for ensuring the vehicle remains on its intended course and improves overall navigational accuracy.
Improvement in Transverse Maneuvers
Heading stabilization enhances transverse maneuvers, adjusting the thruster according to sensor data.
Manually transversing a vehicle sideways is difficult due to the need to counteract dynamic marine conditions such as wind, waves, and currents. This requires constant adjustments to the thrusters and propulsion systems to maintain the desired course and heading. Without automatic systems, it demands significant skill and attention from the crew to achieve precise, stable, and efficient maneuvers, making it a complex and challenging task.
Requirements
- AHRS - attitude and heading reference system
Cross track distance (XTD)
Cross Track Distance (XTD) refers to the lateral deviation of a vehicle from its planned route. Reducing XTD is crucial for maintaining accurate navigation and efficient travel.
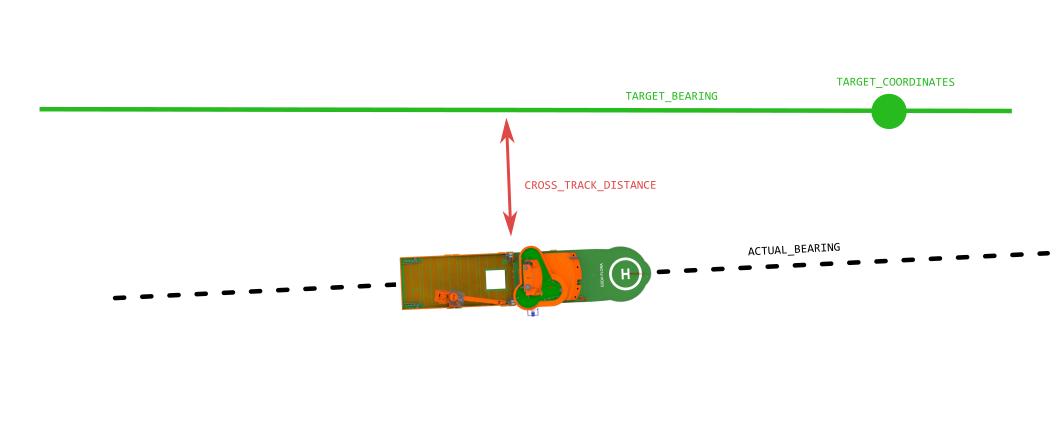
When a deviation from the planned route is detected, the system automatically adjusts the thrusters and propulsion to correct the vehicle's course.
Requirements:
- AHRS - attitude and heading reference system
- Global positioning system
- Heading stabilization
Heading stabilization is essential for compensating Cross Track Distance (XTD) because it maintains the vehicle's intended course despite external forces like wind and currents. Approaching the ideal heading line is achieved through lateral movement (transversing) using thrusters and directional thrust propellers.
Distance from target position
Reducing the distance to a waypoint involves using throttle control in conjunction with managing Cross Track Distance (XTD) and heading.
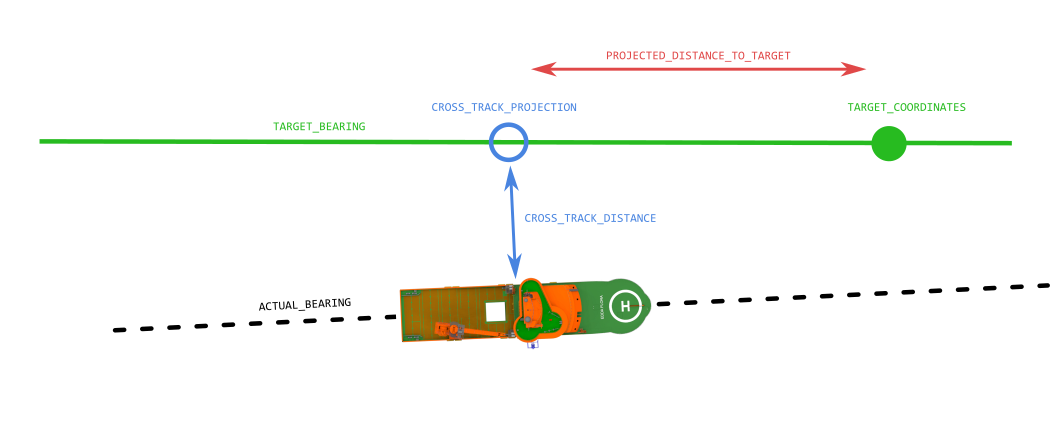
By integrating throttle adjustments with XTD and heading stabilization, the vehicle can efficiently navigate towards the waypoint. Corrective maneuvers based on XTD feedback ensure the vehicle remains on the optimal path, while throttle adjustments control the speed of approach.
Requirements
- AHRS - attitude and heading reference system
- Global positioning system
- Heading stabilization
- Cross track distance control
Vektor, our custom-tailored ecosystem
The ecosystem provides a reliable choice for dynamic positioning. Through sensor fusion and machine learning algoritmhs it is able to determine the USV position in difficult environments, even indoors.
Paired with our software, it delivers precise maneuverability. Unmanned Surface Vehicles (USVs) equipped with distinctive propulsion systems (e.g VSPs, X-arrangement or Z-Drives) can navigate effectively across all dimensions of their freedom.
Both Local Positioning Systems and Global Positioning Systems are supported by the VEKTOR Core.
M8 / M10 receivers alone provide a position hold accuracy of 1-2m.
To achieve sub-meter accuracy, we recommend using a RTK capable systems and GNSS receivers like the F9P. These can be attached either to the VEKTOR Core or to the Autopilot if correctly configured.
A good tuning of all PID parameters is also required and affects the DP accuracy.
Contact us for more information about RTK.

VEKTOR Core
MAVLink v2 compatible, open architecture propulsion controller.
VEKTOR Autopilot
Industrial-grade open architecture USV autopilot, INAV/ArduPilot compatible.
AHRS - Compass
Industrial-grade attitude and heading reference system.USV's & Scale Models
A vehicle capable of dynamic positioning is one that can move freely along two axes of freedom, typically referring to both longitudinal and lateral directions. This capability allows the vehicle to maintain a specific position or follow a precise path despite external forces such as wind, waves, or currents.
This capability is further influenced by factors such as propulsion, size, weight, and controller tuning. Therefore, compatibility is evaluated on a case-by-case basis. Propulsion systems must provide sufficient thrust and maneuverability to counteract external forces. The size and weight of the vehicle affect its inertia and response to control inputs. Precise controller tuning is essential to ensure the vehicle can react appropriately to dynamic conditions. Consequently, the feasibility and effectiveness of dynamic positioning for a specific vehicle depend on a careful assessment of these factors, tailored to the vehicle's intended operational environment and specific requirements.
We offer conversion kits and/or provide complete conversions for the following products:

SOVA - Multipurpose USV barge - up to 25Kg
Hull Manufacturer: SEAWORKS.IO
Propulsion: 4x Fixed thrusters

EDDA FLORA - Full digital propulsion with DP - scale model 1/75
Hull Manufacturer: BAUER
Propulsion: 2x Voith-Schneider Propeller

SEABEX TWO - Full digital propulsion with DP - scale model 1/75
Hull Manufacturer: HALLER
Propulsion: 2x Z-Drives