Wiring
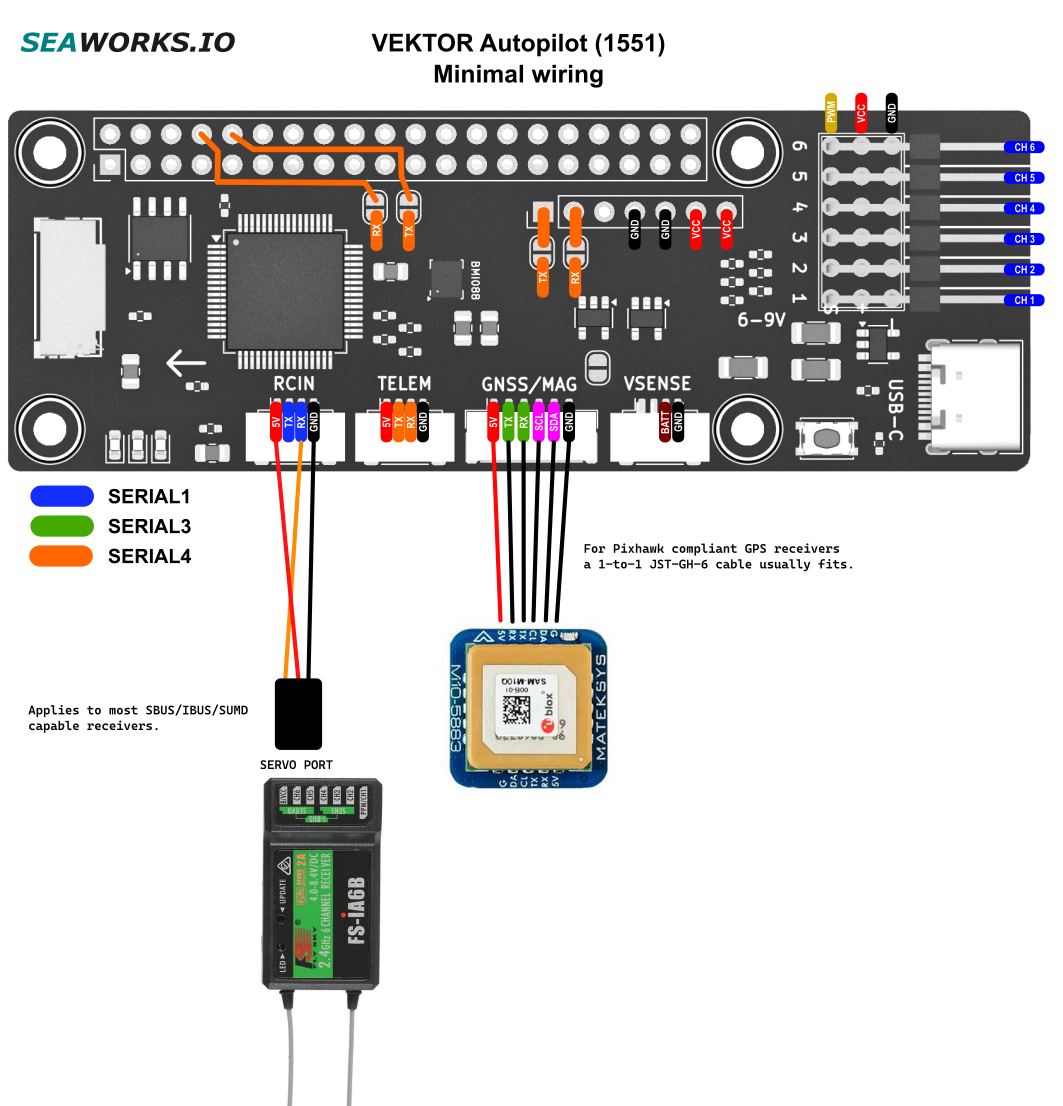
Basic wiring
Wire colors may change, RX connects to TX and viceversa. The Autopilot only supports receivers that output a serial signal like IBUS, SBUS, SUMD, ELRS..
For complex wiring also look up the common power and signal rails.
Battery voltage sensing
The BATT pin should be connected to the positive terminal of the battery, the ground pin to the negative terminal. Up to 6S (26V) batteries are supported.
Do not connect any other pin/port to the battery terminals as this action will immediately destroy the board.
A manual voltage calibration has to be performed in Mission Planner in order to display accurate values.
Receivers with both PWM and serial
Receivers with many PWM ports and a serial output can be used togheter with the Autopilot. A careful channel mapping on the transmitter is necessary. It is then possible to combine the serial signal to the Autopilot and use the remaining PWM ports on the receiver.
For short distance applications we recommend FlySky iA6B and iA10 receivers, which have PWM outputs and a serial output.
This is also doable with some Graupner HoTT receivers.
HoTT RX + telemetry
As HoTT telemetry uses a different baud-rate compared to SUMD, it needs to use a further port to be used. You can use the SBUS port to attach the telemetry cable (connects the TX pin on the controller to the telemetry channel port on the RX).
Furthermore the configuration of the SERIAL4 port should be:
SERIAL4_BAUD set to 19 (for 19.2KBaud)
SERIAL4_PROTOCOL set to 27 (HOTT)
SERIAL4_OPTIONS set to 4 (Half Duplex)