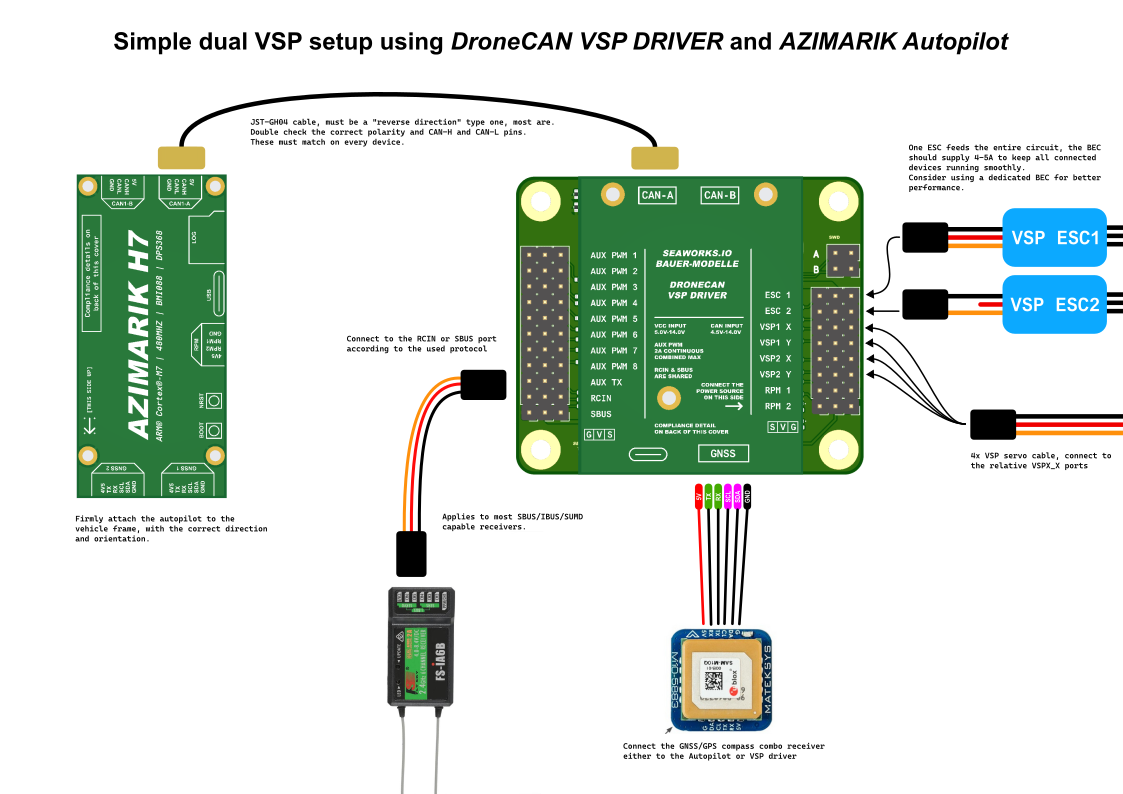
The AZIMARIK Autopilot will gather both data and power from the VSP Driver board. No further connections are necessary. The initial configuration and mission planning must however be done via its USB port or telemetry. Because of this make sure it is placed in a well accessible place.
It is possible to swap the AZIMARIK Autopilot with any CAN-bus capable autopilot such as the Pixhawk 6. The power wiring of the autopilot must be then adapted accordingly.
You may attache the GPS/Compass combo either to the VSP Driver board or to the AZIMARIK Autopilot. The configuration won't differ much. It should however lay far away from the bulk of electronics to avoid interferences, with the roof of the vehicle being usually the best place.
Most not inverted RC protocols are auto discovered on the RCIN port of the VSP Driver. For inverted protocols like SBUS use the inverted SBUS port.
In case of ELRS, these can be attached to the Autopilot only. You can use a empty GNSS/GPS port for it. The supported antennas are U-Blox M8, M9, F9, M10 series. Supported compasses are HMC5883, QMC5883, IST8310, which are the most common around.
The power source (ESC or BEC) will supply power both to the Receiver, GPS/Compass combo. Make sure these support the given voltage (most modern ones do).