Type 1675 Autopilot for Quadcopters (SKU: 1675)
This controller is designed for UAVs undertaking long survey missions where endurance is critical, featuring state-of-the-art, high-precision sensors from European manufacturers.
The following datasheet applies universally to all versions. However, different variations in quality and grades are available, which may affect the intended usage.
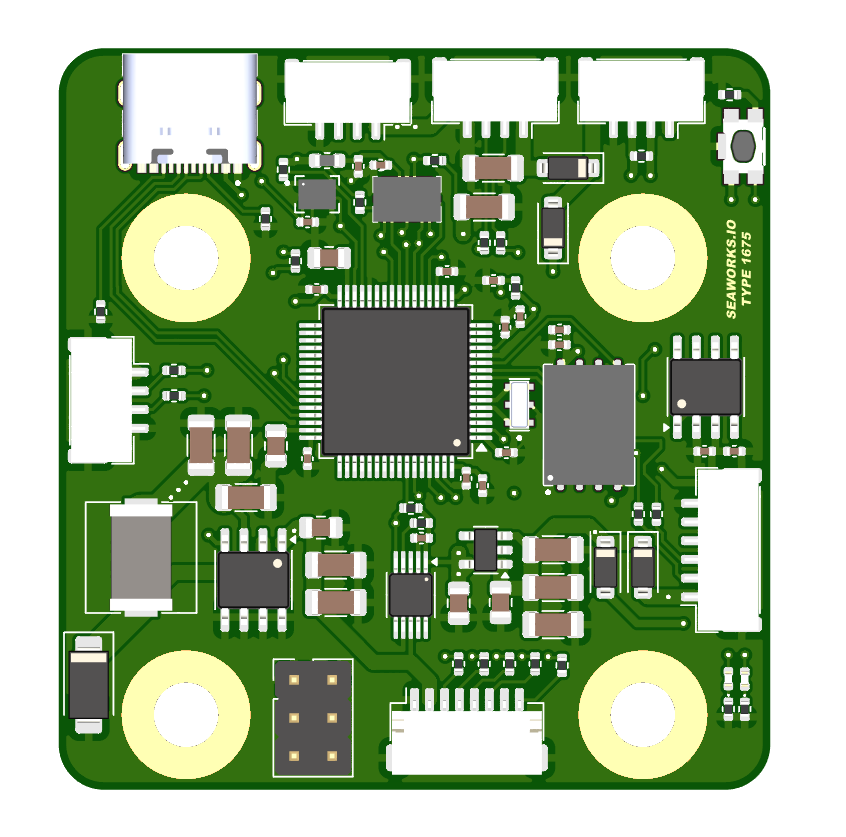
Type 1675 Autopilot consists of a single-side assembled circuit board with M4 holes that respect the 30x30mm mounting standard.
The Autopilot board can function independently as a central processor connected and powered solely via CAN for the vehicle.
For the software capabilites please refer to the respective project:
We do not provide free support for the above-mentioned software or their respective configuration tools.
The module is designed to operate without the need for soldering. The JST-GH connectors ensure vibration-resistant connections.
The average cold-start time with Ardupilot is around 10 seconds.
Technical specifications
| SKU: | 1675 |
| Supply Voltage (Ub): | BATTERY SENSE: 5.0-26.0V CAN: 4.5V-14.0V |
| Power consumption: | Standby current approx. 200 mA |
| PWM outputs: | 4x on JST-SH-08 ESC connector • PWM (500 - 2500 us) • DSHOT/BDSHOT |
| Ports: | • GPS/I2C combo port 1 JST-GH 6pin • CAN JST-GH 4pin • 2x UART JST-GH 4pin • I2C JST-GH 4pin • 2x JR ports with UART RX/TX • USB-C |
| Buttons: | • Boot button |
| Protection features: | • EMI • ESD up to 15kV |
| MCU: | 160MHz Arm® Cortex®-M4 (STM32F405) |
| IMU: | BOSCH Sensortec BMI088 |
| Barometer: | Infineon DPS368 |
| BEC (self-powering): | 5V @ 2.5A for MCU, UART peripherals and CAN |
| Extensions: | • 120 Ω CAN terminator |
| Operating temperature range: | 0 – 60° C |
| Maximal relative air humidity: | Max. 85 % |
| Dimensions: | 50.0 mm x 48.0 mm |
| Regulatory: | RoHS compliant |
| Other: | This board has no inverted UART RX pads. |
Operating system and Firmware
AZIMARIK Autopilot runs ArduPilot natively, with configurations based on the ArduCopter, ArduPlane, ArduRover or ArduSub platforms. Most functions are those provided by ArduPilot for these vehicle types, including navigation, control modes, and sensor support.
The operating system is ChibiOS.
Requirements
Physical
The Controller must be placed within a dry zone, properly fastened with screws to the vehicle hull while ensuring good grounding to other systems.
An Arrow indicates the forward direction of the vehicle, the controller has to be placed accordingly. A misplacement will cause the IMU not to work properly.
In order to work properly, the controller should be placed as close as possible to the center of gravity of the vehicle so that the accelerometer measures true linear acceleration without additional components caused by rotational motion around the center of gravity.
We recommend mounting the board with rubber standoffs to minimize vibrations and enable the IMU to provide more accurate data.
Electrical
The internal BEC works in a range from 5 V to 26 V. The idle current consumption is around 200mA.
When powered by the CAN port, a voltage of 5V +- 0.5V should to be supplied.
A steady current flow is necessary to power up all systems and ensure a reliable operation. Please consider this while designing the electrical part of your UAV.
It is possible to power only the MCU and sensor part through the USB-C port. This feature serves testing and configuration purposes. In production use do not use the USB-C port to power the Controller.
All UART JST-GH ports are provided with stable 5V, they shouldn't draw more than 500mA each.
When supplying 5V, the GPS and RX port will output 4V5 (4.5V). 4V5 works with most peripherals, but not all, especially older ones.