

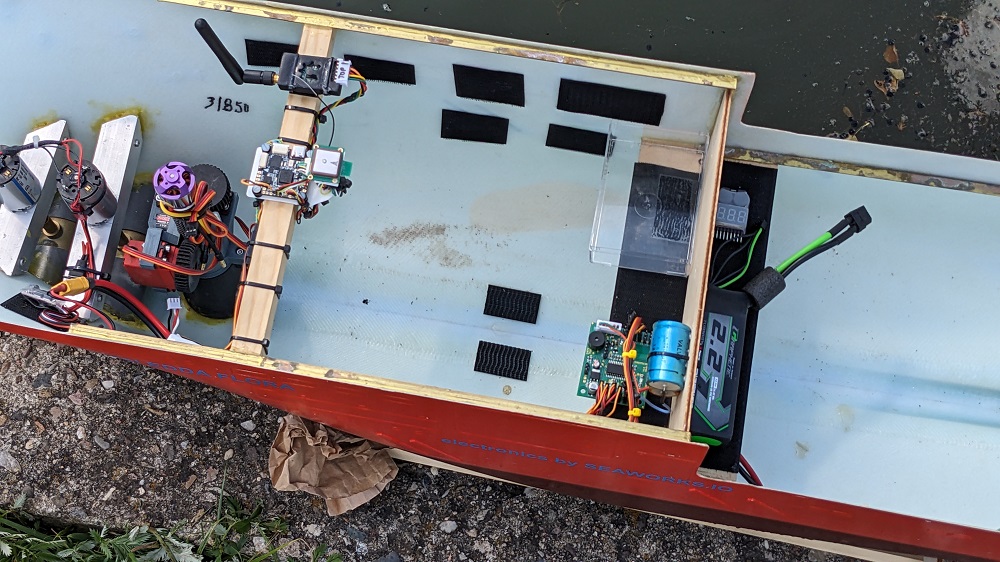
In August, we completed our preliminary tests of the CLIM PRO. This work encompassed not only software development but also optimizations of the electrical circuits on the EDDA FLORA test platform. Our efforts involved working on the power supply, replacing components, measuring magnetic fields, testing the integration of CLIM PRO with various autopilots, and conducting H24 tests. These trials took place in both closed and open water environments, under varying conditions of dirtiness and windiness.

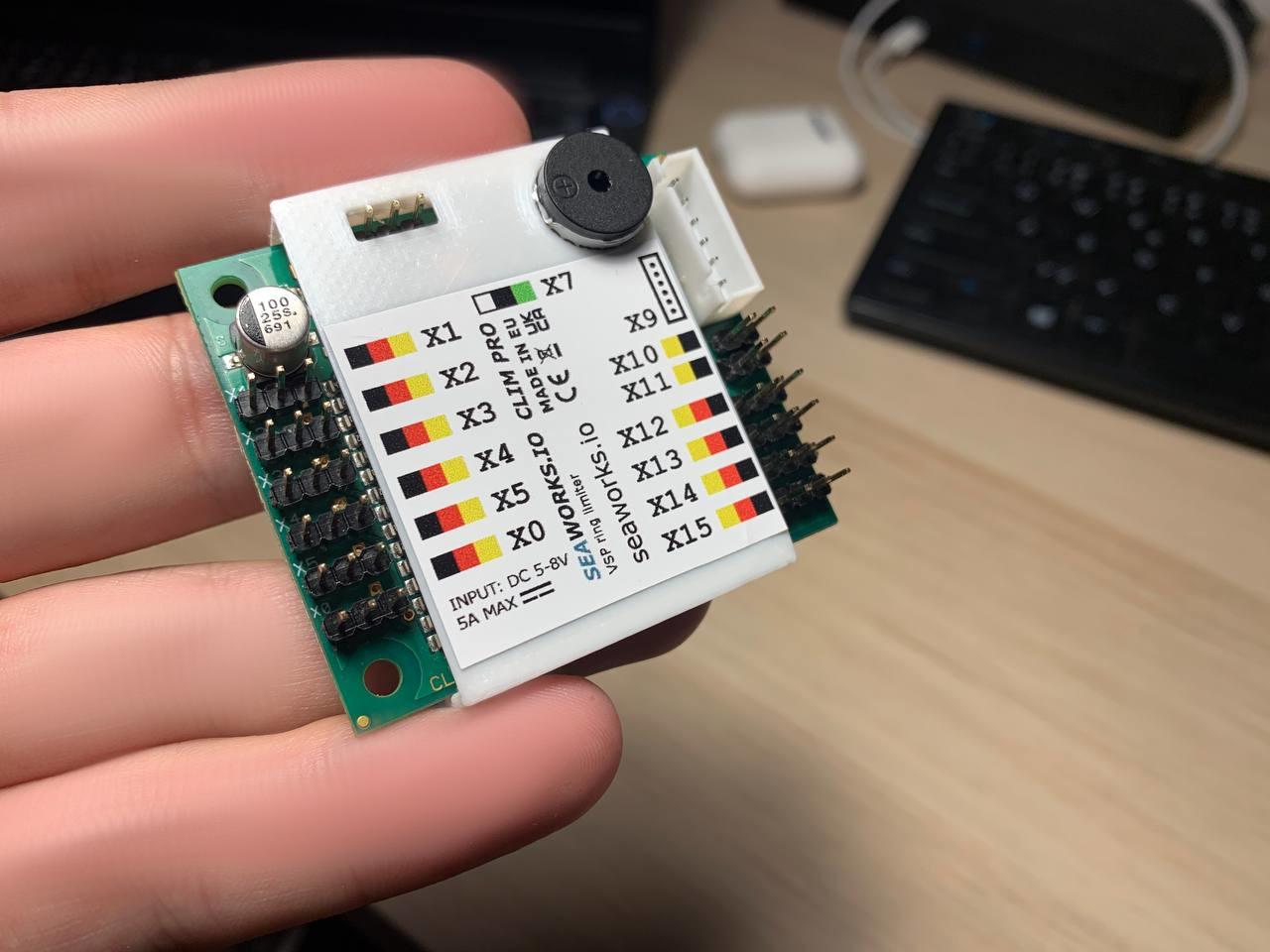
The CLIM PRO platform exclusively utilizes the S.BUS protocol for connectivity. This protocol enables a direct two-wire connection to the autopilot, providing 16 channels of communication. This fully digital configuration serves to prevent errors and streamline overall complexity. Please note that this setup necessitates an autopilot equipped with an ST H7 processor.
The CLIM PRO is recognized as a reference in the UAV and UAS market. In the case of the latter, our reference platform is Ardurover 4.4. The autopilot output adheres to the standard for surface vehicles, with our CLIM PRO handling all other aspects. Presently, we are capable of maintaining the EDDA FLORA vessel within a radius of approximately 1 meter, even in slightly windy conditions. However, it's important to note that performance may be influenced by cloud conditions and GPS reception.
Furthermore, the CLIM PRO effectively manages engine RPM and Bowthrusters, which can be activated as needed. The complete navigation and control of the VSP units can be accomplished through a single stick or can be configured differently based on requirements. Additionally, a fully manual mode is also available.
We have also conducted successful tests of a fully automated navigation mode, during which the EDDA FLORA demonstrated excellent performance. Additionally, a 4-hour-long position-hold test yielded positive results. Currently, we are in the process of fine-tuning the control algorithms. These adjustments must be made with the boat under its full weight and with the superstructure completed.
Our aim is to be fully prepared by the month of October. It's important to note that, given the complexity of the system and its electrical components, the CLIM PRO will be exclusively available as a fully assembled kit, including the boat and autopilot from Bauer-Modelle, or upon special request. Additionally, we have plans to manufacture PWM and current distribution boards to simplify the wiring process for the boat.
CLIM Pro is set to introduce a wide range of advanced functions, it is more than only a marketing term.
Users will have the ability to adjust nearly all parameters to their liking.
In addition, the enterprise market variants of CLIM Pro will include Bluetooth LE connectivity, enabling seamless wireless communication. Furthermore, inputs and outputs can be easily managed through a single wire SBUS connection. The standout feature of CLIM Pro is its capability to effortlessly control VSP propellers with basic directional inputs from any autopilot system. Currently, CLIM Pro is undergoing testing, and a video demonstration will be available shortly, providing a brief overview of its capabilities.
In late 2022 we choose to sell public one of our niche products. This board was born a few years ago as a simple interface to reliable control servos of robots and aid during the prototyping phase.
Its main purpose is to get rid off typical protoype configurations (Arduino, breadboard, some resistors plugged in, crappy power delivery) and offer a reliable production like environment for servos/actuators with solid power management.
Initially designed like a soldered mini-board, we later designed our CLIM module to be able to fulfill this function too, with just some little adjustments during the manufacturing process. In this way we can guarantee a Industry-grade design, which the CLIM is, for this project.
Aside the control servos, you'd be also able to control ESCs and read values from up to five (5) PWM sources. The other main advantage is the electrical isolation from the processor (Arduino, Raspberry Pi, Whatever else) from the power electronics and leave this concerns entirely to this module.
The module communicates with other devices through UART, one of the simplest but still reliable serial implementations, with a series of easy and short commands. Our simple protocol uses a software flow control, more about it here.
We tried to keep the UART read latency inside the module controller close to zero, the response of the overall system mostly depends from the control part (Arduino code, Python program on Raspberry Pi) and how those interfaces are addressed. In most cases the servo response is fast enough for any sensor controlled system (20-30 ticks per second).
When performing a complete Read-Compute-Write cycle (Read PWM, send through UART, compute, resend through UART, Write PWM) the latency can increase a bit more. In our lab test those values are still more than acceptable for automated systems. Truly real-time critical system like control surfaces on a Rocket may not work well tho, we don't reccomend the module for these use cases.
A summary of the features:
We ship the Serial-Servo-Hub with a little test program (link on the project page) and some example scripts in Python.
This spring we also plan to roll-out our more advanced CLIM Pro kit with the VSP PODControl module, which will fit the requirements for complex vessel control. The development of the VECTOR platform based on STM32 is also ongoing and we aim for a presentation later this year.
That's all for now, more updates about the VSP PODControl will follow in the next weeks.
Heavy GIF image in this article.
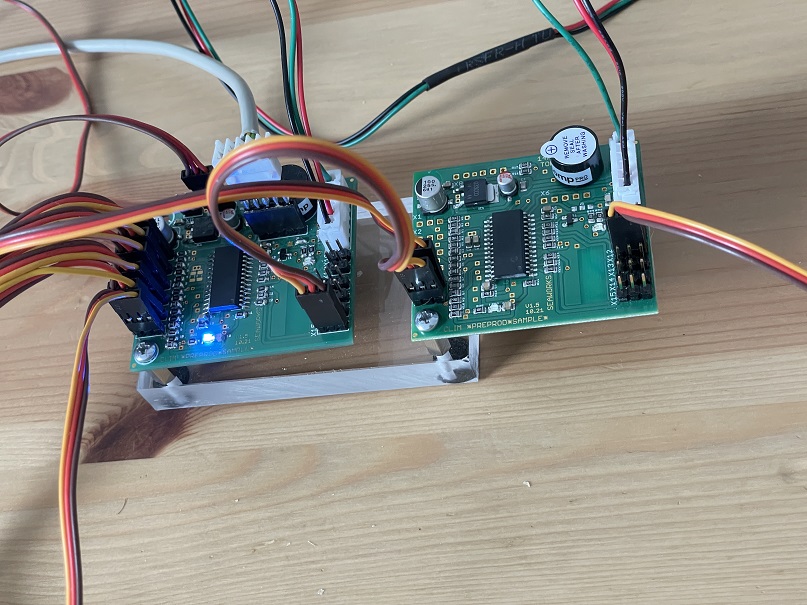
While doing preliminary research and prototyping for the VECTOR project, we are also constantly working on our CLIM PRO + PODControl combo.
These will allow a much more integrated and flawless control over projects that include Bowthrusters and/or Azipods aside VSP propellers. The two modules are networked togheter and can be placed in different locations inside your project. They will make a complete control of the vessel possible using only 6 channels.
Because most of the time during development we don't have access to the actual hardware where the controllers will be built in, inhouse made simulators and debuggers come handy.
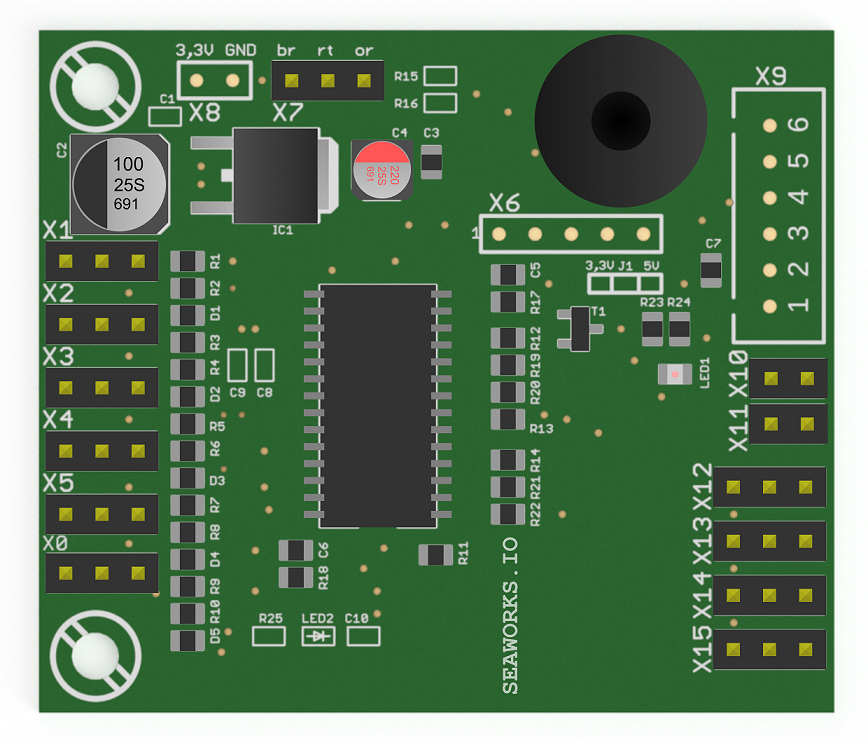
Thanks to the modular architecture of the CLIM project, we are able to network multiple modules without too many board related changes.
In particular, the modules are connected togheter with a inter-integrated circuit network (I²C). It needs two wires for the signal and one for the commond ground. Thanks to the sleek protocol and low bitrates, longer wires between the modules are also possible.
A big focus is also put on the open I²C slave interface of the PODControl, which will give the planned VECTOR module and other controllers the possibility to communicate with this extension module.
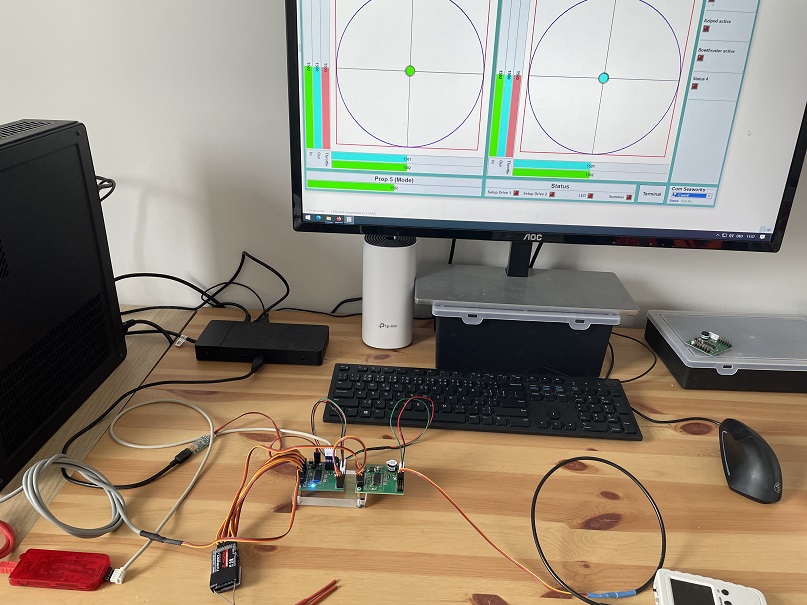
We plan to release a companion application for Windows, similiar to the one we use for testing, in order to simplify the configuration of the CLIM PRO + PODControl combo.
The CLIM PRO will feature a UART communication connector which will allow to fine tune some parameters using a windows application or a simple serial terminal. It also gives the possibility to display the current servo output on the computer screen so it's possible to double check your VSP configuration and see changes in real time.
In the next posts we want to dive a bit more in the detail of these modules and also show how the configuration will happen :)
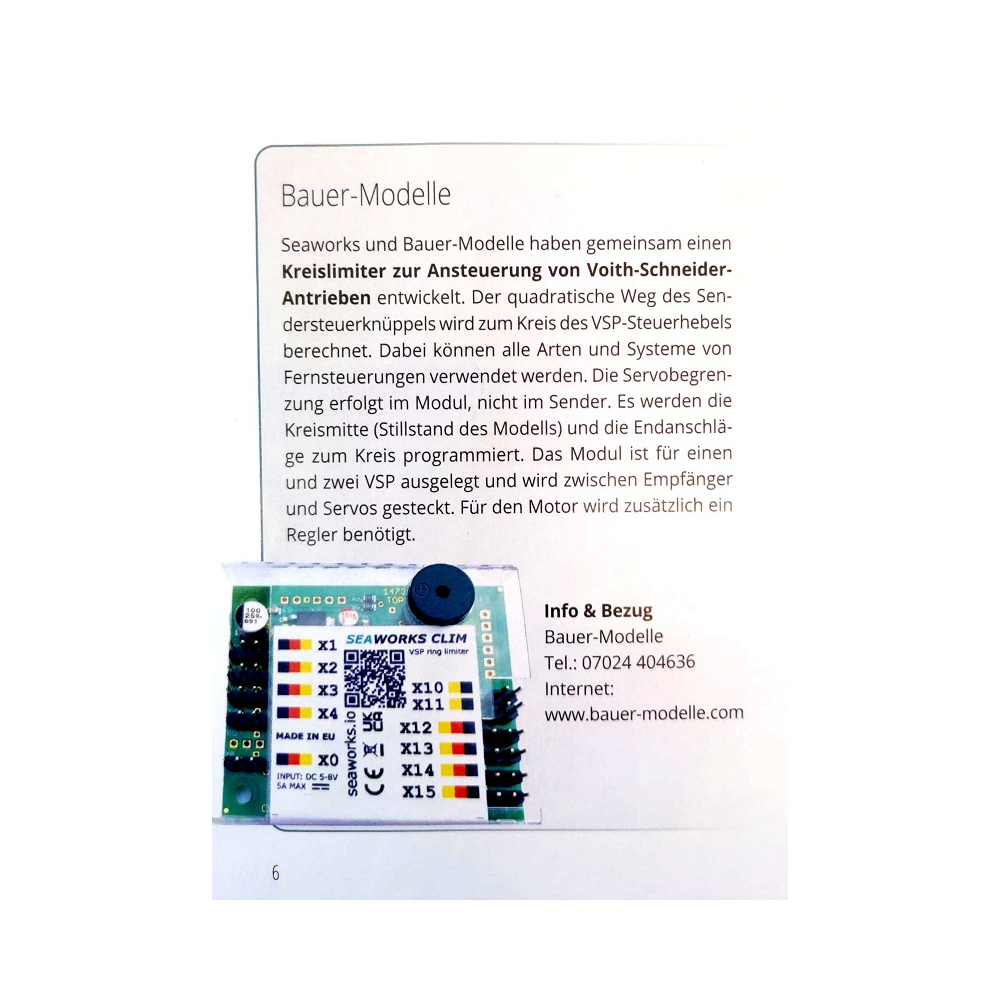
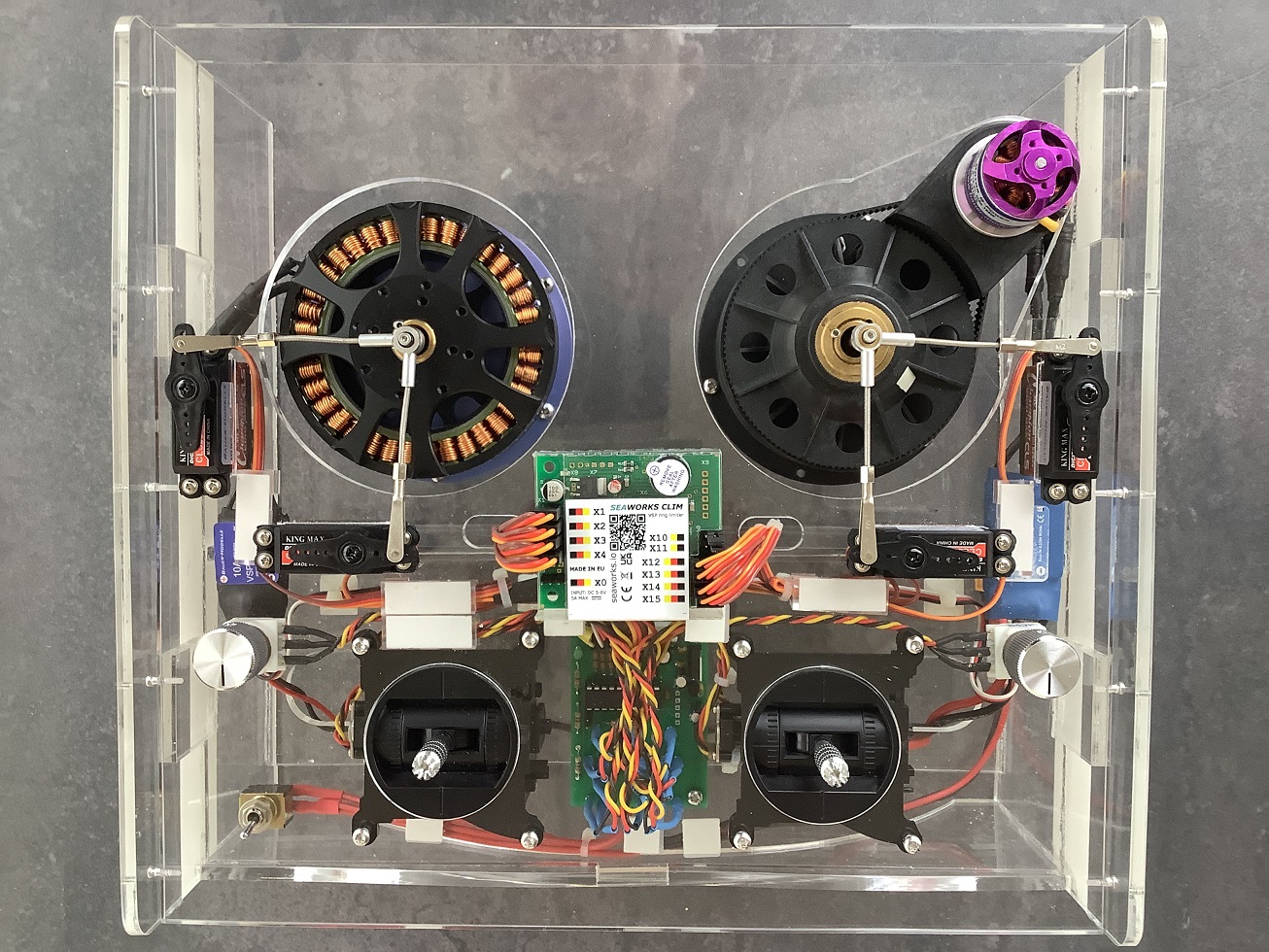
We partnered again with Bauer-Modelle during the development of the VSP demo kit, taking care of the electronic part.
Under hood there is a proportional signal generator which picks up the analog signal from two Hall-effect-sensor equipped sticks and two industry grade potentiometers.
The signal then passes into our ring limiter and is computed, then the processed proportional signals powers the Voith-Schneider Propellers.
The VSP demo kit will be visible at Voith SE in Heidenheim on October 4, 2022.
Our new project PODControl will expand the functions of the CLIM Pro, adding the possibility to control bowthrusters and an eventual bow mounted Azipod like the one found on the EDDA FLORA.
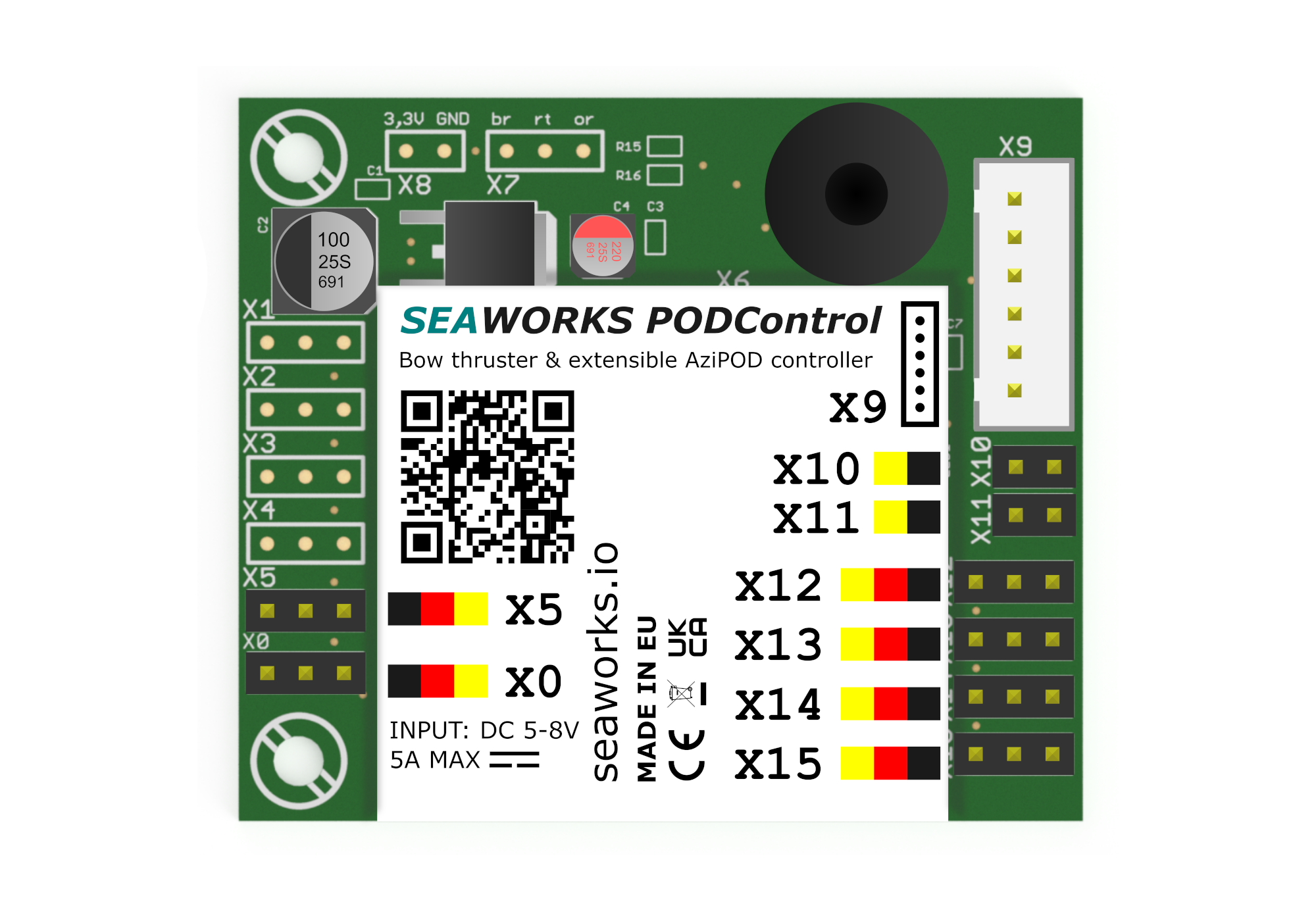
It will give the full control of the Azipod like lowering, retracting, rotating, RPM. The controls are fully integrated with the CLIM Pro so you will achieve everything by using at least 5 channels.
The PODControl controller will be connected by wire with the CLIM Pro, giving the possibility to accomodate it wherever needed. Many parameters are customizable through the serial port.
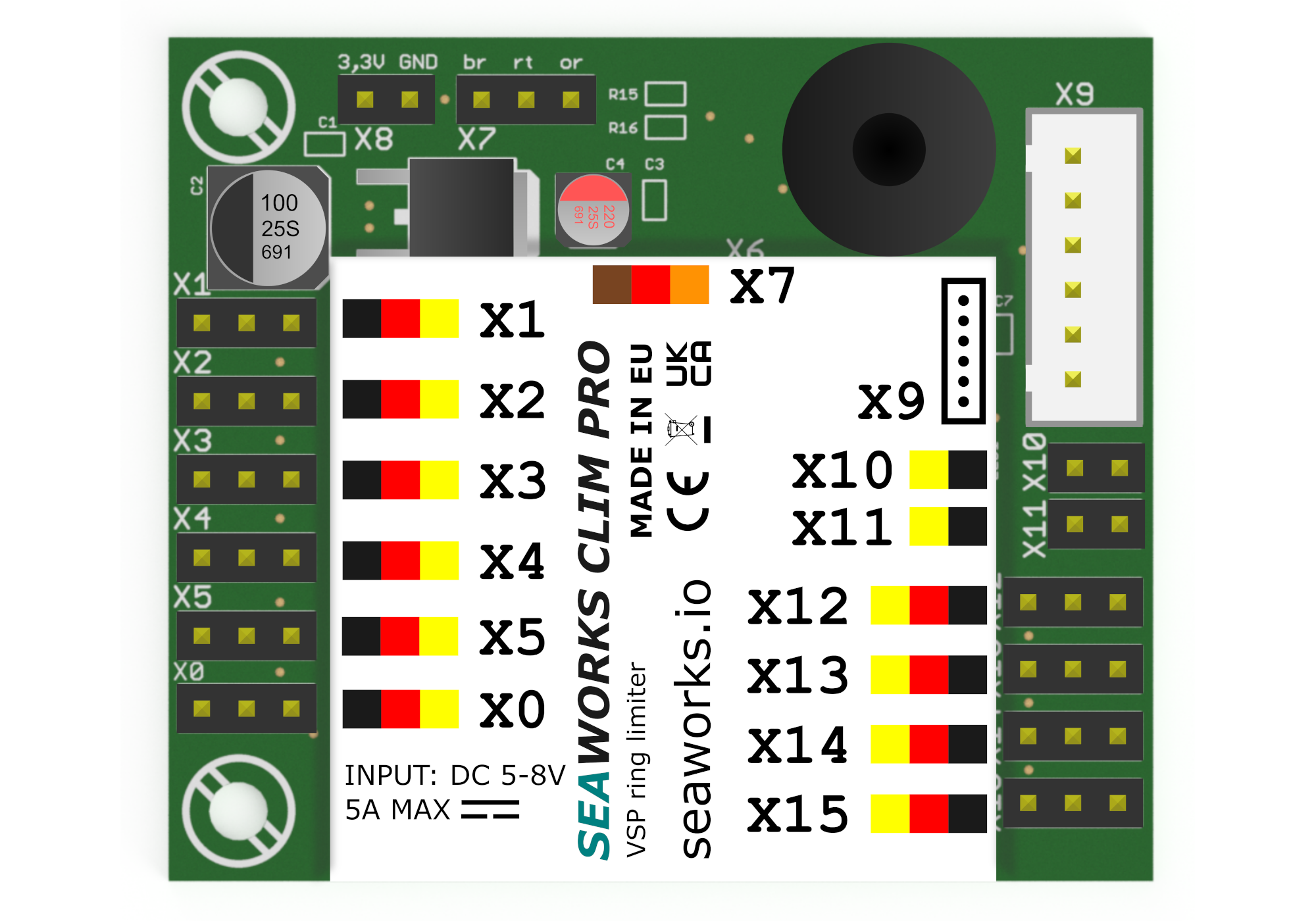
This side-project of the original CLIM enables a more granular configuration of the limiter properties. It will also feature a complete remap of the VSP commands, allowing both propellers to be controlled by one single stick, leaving the other stick configurable for example to be used by the bowthrusters. The configuration will be done through the serial port. It will also be usable in combination with another module which will control rectractable Azipods.. we will publish detailed information here in the near future :)
We got mentioned on the prestigious german magazine ModellWerft edition 08/2022.
In the 05/2022 edition you will also find an article about Bauer-Modelle's Biene tug which implements our ring limiter in it's close-to-unique single VSP configuration. More about that gorgeous tug here.