Introduction (SKU: 1504)
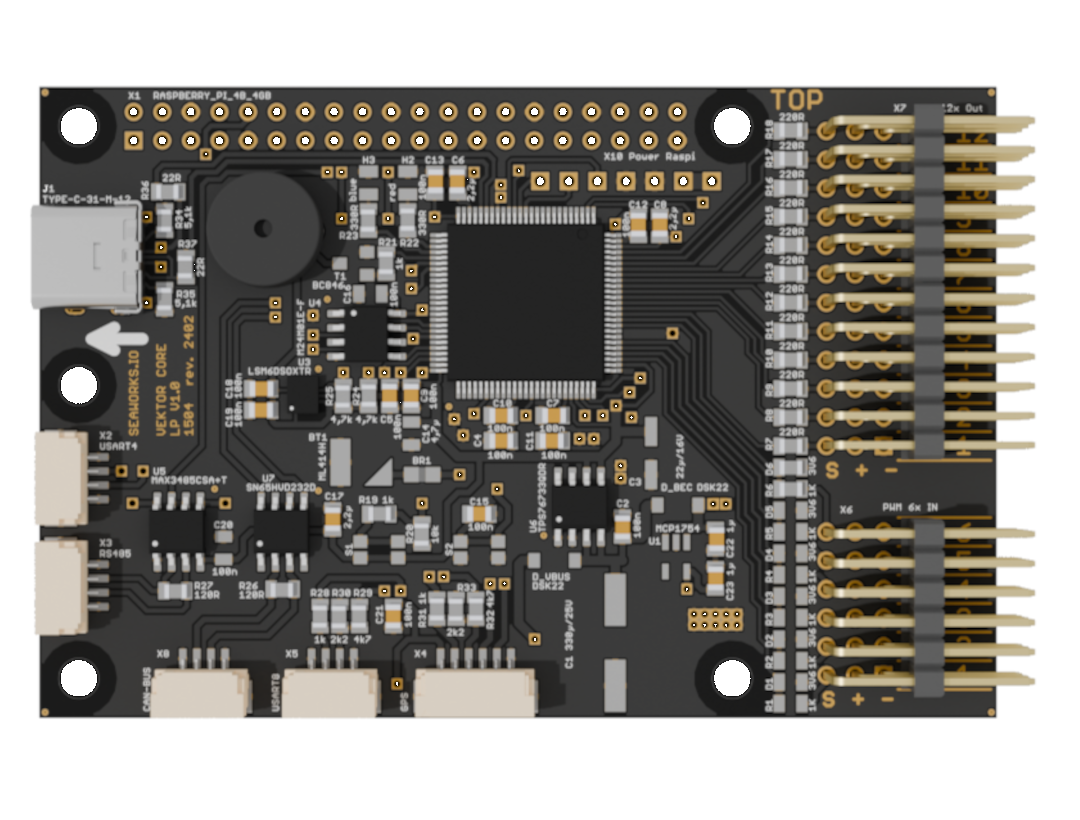
The control unit, VEKTOR Core, is the center of our broader hardware/software VEKTOR platform, which forms an integrated control system for unmanned vehicles. The VEKTOR Core board is a central part of micro to small USVs (Unmanned Surface Vehicles). It offers multiple inputs and outputs to connect commercially available hardware like speed controllers, servos, and sensors.
Altough capable of working in standalone mode, this unit is meant to work in networked mode. Through its RS485 and CAN connections, an infinity of applications are possible.
The Vektor Core and its firmware work in a predictable (deterministic) way, meaning the it controls the hardware is reliable and certain. This makes it perfect for controlling USV hardware.
By connecting a Linux-powered single-board computer (SBC) like a Raspberry Pi or Nvidia Jetson, it is possbible to add enhanced navigation, machine learning and AI features to the VEKTOR Core. These combinations also allows to send/receive commands through 4G or satellite communication. Other compatible hardware includes Siemens PLCs and MODBUS compliant devices.
Prosumer hobbyists can also benefit from this platform, as it allows them to configure and control their model ship or vehicle with precision and ease, offering extensive customization options.
Technical specifications
| SKU: | 1504 |
| Supply Voltage (Ub): | 6-20V |
| Power consumption: | Standby current approx. 200 mA |
| PWM inputs: | 6 inputs • PWM (1000 - 2000 us) |
| PWM outputs: | 12 outputs • PWM (500 - 2500 us) |
| Additional ports: | • UART JST-GH 4pin (2x) • GPS/i2c combo port JST-GH 6pin • RS485 JST-GH 4pin • CAN JST-GH 4pin • UART/i2c Raspberry Pi compatible header • Power+UART HAT port 7pin • USB-C |
| Buttons: | • Reset button • Boot button |
| Protection features: | • Short circuit protection over BEC |
| CPU: | 480MHz ARM M4 |
| IMU: | ST LSM6DSOX |
| Memory: | 1MB ST M24M01 EEPROM |
| Operating temperature range: | 0 – 60° C |
| Maximal relative air humidity: | Max. 85 % |
| Dimensions: | 85.6 mm x 56.5 mm x 1.6mm Raspberry Pi hole layout |
| Regulatory: | RoHS compliant |
Requirements
Physical
The Controller must be placed within a dry zone, properly fastened with screws to the vehicle hull.
An Arrow, near the USB-C port, indicates the forward direction of the vehicle, the controller has to be placed accordingly. A misplacement will cause the IMU not to work properly.
Electrical
The Controller works in a range from 6 V to 20 V. The idle current consumption is around 200mA.
Altough technically it is possible to draw power from a broader voltage range (5-31V), we don't recommend this, nor we will cover these cases in warranty.
A steady current flow is necessary to power up all systems and ensure a reliable operation. Please consider this while designing the electrical part of your USV.
The Controller can be powered via all ports on X6 and X7 rails. Additionally it is possbile to power it via port X10. The ports X6, X7, X10 are electrically interconnected.
It is possible to power only the CPU and sensor part through the USB-C port. This feature serves testing and configuration purposes. In production use do not use the USB-C port to power the Controller.
The USB-C power rail is isolated from ports X6, X7, X10. Only the standard 5V voltage is supported on the USB-C port.